BNO08x IMU driver class. More...
#include <BNO08x.hpp>
Classes | |
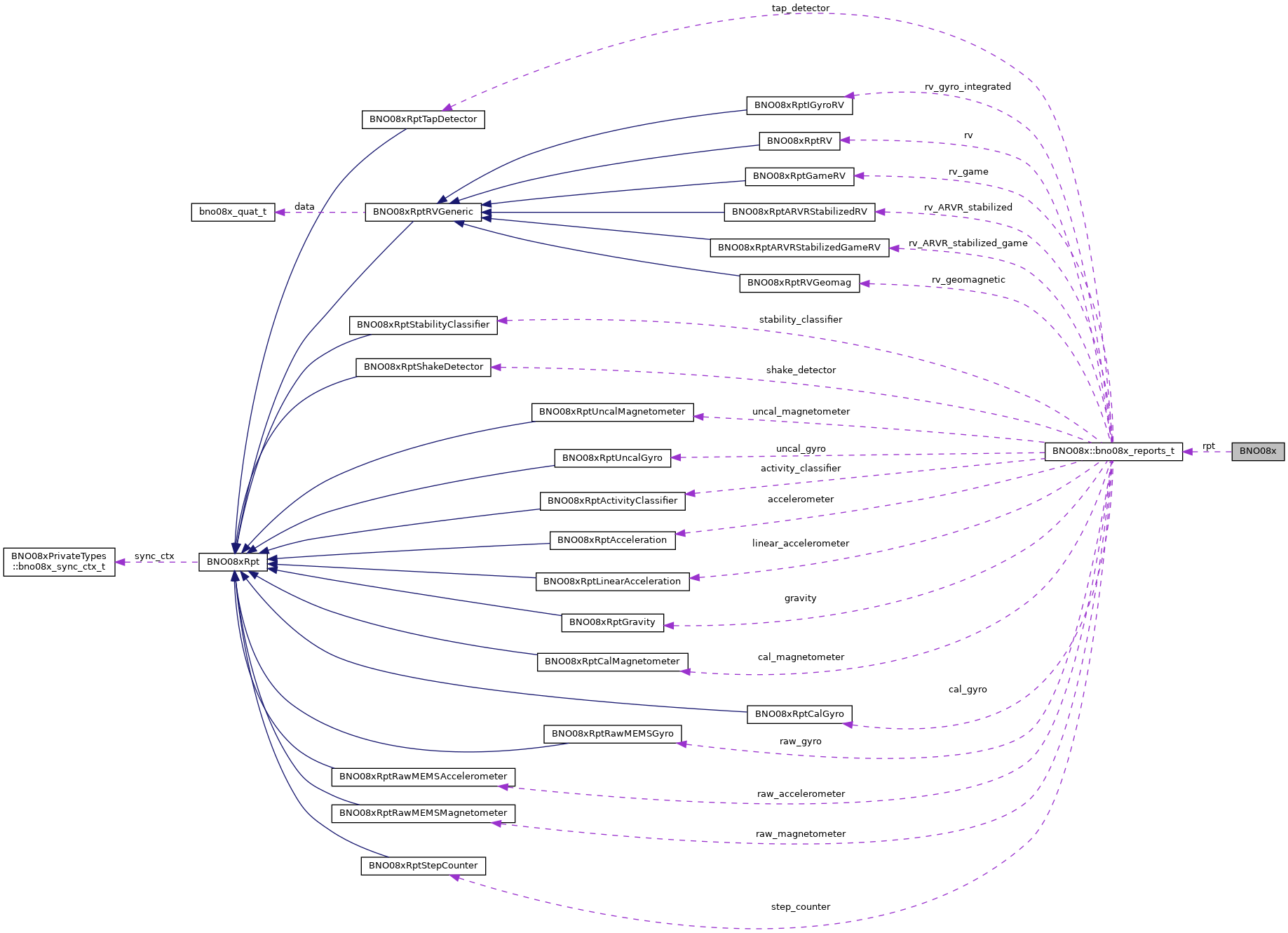
| struct | bno08x_reports_t |
| Contains report implementations. More... | |
Public Types | |
| typedef struct BNO08x::bno08x_reports_t | bno08x_reports_t |
| Contains report implementations. More... | |
Public Member Functions | |
| BNO08x (bno08x_config_t imu_config=bno08x_config_t()) | |
| BNO08x imu constructor. More... | |
| ~BNO08x () | |
| BNO08x imu deconstructor. More... | |
| bool | initialize () |
| Initializes BNO08x sensor. More... | |
| bool | hard_reset () |
| Hard resets BNO08x device. More... | |
| bool | soft_reset () |
| Soft resets BNO08x device by sending RESET (1) command on "device" channel. More... | |
| bool | disable_all_reports () |
| Disables all currently enabled reports. More... | |
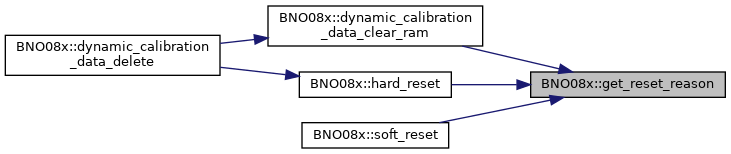
| BNO08xResetReason | get_reset_reason () |
| Returns reason for previous reset via product ID report. More... | |
| bool | on () |
| Places BNO08x device in on state by sending ON (2) command on "device" channel. More... | |
| bool | sleep () |
| Places BNO08x device in sleep state by sending SLEEP (3) command on "device" channel. More... | |
| bool | dynamic_calibration_enable (BNO08xCalSel sensor) |
| Starts simple calibration, see ref. manual 6.4.10.1. More... | |
| bool | dynamic_calibration_disable (BNO08xCalSel sensor) |
| Disables dynamic/motion engine calibration for specified sensor(s), see ref. manual 6.4.6.1. More... | |
| bool | dynamic_calibration_autosave_enable () |
| Enables the automatic saving of dynamic/ME calibration data to BNO08x internal flash See ref manual 6.4.7.1. More... | |
| bool | dynamic_calibration_autosave_disable () |
| Disables the automatic saving of dynamic/ME calibration data to BNO08x internal flash See ref manual 6.4.7.1. More... | |
| bool | dynamic_calibration_save () |
| Saves dynamic/motion engine calibration data to BNO08x internal flash immediately. See ref manual 6.4.5.1. More... | |
| bool | dynamic_calibration_data_clear_ram () |
| Clears dynamic/motion engine calibration data from ram and resets BNO08x device. See ref manual 6.4.9.1. More... | |
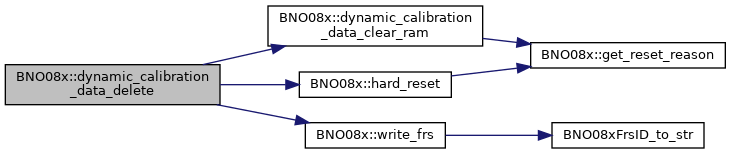
| bool | dynamic_calibration_data_delete () |
| Deletes dynamic calibration data from BNO08x internal flash and resets the device. Follows the steps outlined in ref. manual 6.4.9. More... | |
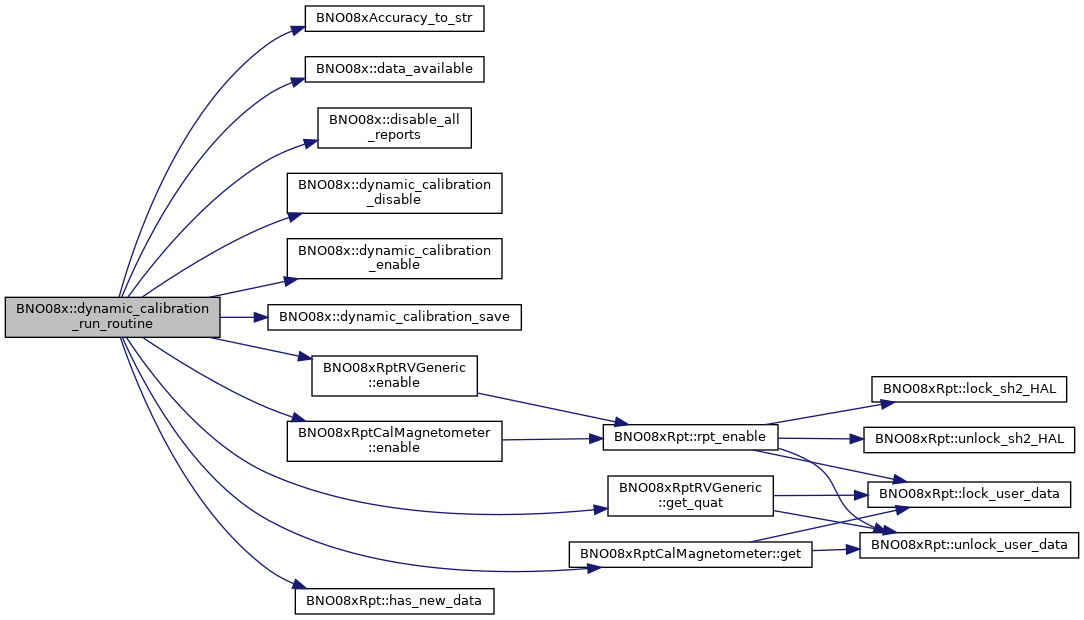
| bool | dynamic_calibration_run_routine () |
| Example calibration routine using dynamic/ME calibration commands. More... | |
| bool | set_system_orientation (float w, float x, float y, float z) |
| Sets the system orientation of the BNO08x device and persist it in flash (FRS). More... | |
| bool | get_system_orientation (float &w, float &x, float &y, float &z) |
| Retrieves the system orientation of the BNO08x device and converts to float. More... | |
| bool | get_frs (BNO08xFrsID frs_ID, uint32_t(&data)[16], uint16_t &rx_data_sz) |
| Retrieves a record from flash record system (if your goal is to retrieve sensor specific meta data use the BNO08xRpt:get_meta_data() method instead) More... | |
| bool | write_frs (BNO08xFrsID frs_ID, uint32_t *data, const uint16_t tx_data_sz) |
| Writes a record to flash record system. More... | |
| sh2_ProductIds_t | get_product_IDs () |
| Returns product ID info sent by IMU at initialization. More... | |
| bool | data_available () |
| Polls for new data/report to become available. More... | |
| bool | register_cb (std::function< void(void)> cb_fxn) |
| Registers a callback to execute when new data from a report is received. More... | |
| bool | register_cb (std::function< void(uint8_t report_ID)> cb_fxn) |
| Registers a callback to execute when new data from a report is received, overloaded with callback param for most recent report ID. More... | |
| void | print_product_ids () |
| Prints product IDs received at initialization. More... | |
| void | print_system_orientation () |
| Retrieves and prints system orientation. More... | |
Public Attributes | |
| bno08x_reports_t | rpt |
Static Public Attributes | |
| static constexpr float | SQRT2OVER2 = 0.7071067811865476f |
Friends | |
| class | BNO08xSH2HAL |
| class | BNO08xTestHelper |
Detailed Description
BNO08x IMU driver class.
Member Typedef Documentation
◆ bno08x_reports_t
| typedef struct BNO08x::bno08x_reports_t BNO08x::bno08x_reports_t |
Contains report implementations.
Constructor & Destructor Documentation
◆ BNO08x()
| BNO08x::BNO08x | ( | bno08x_config_t | imu_config = bno08x_config_t() | ) |
BNO08x imu constructor.
Construct a BNO08x object for managing a BNO08x sensor.
- Parameters
-
imu_config Configuration settings (optional), default settings can be seen in bno08x_config_t
- Returns
- void, nothing to return
◆ ~BNO08x()
| BNO08x::~BNO08x | ( | ) |
Member Function Documentation
◆ data_available()
| bool BNO08x::data_available | ( | ) |
Polls for new data/report to become available.
- Returns
- True if new data/report became available before DATA_AVAILABLE_TIMEOUT_MS.

◆ disable_all_reports()
| bool BNO08x::disable_all_reports | ( | ) |
Disables all currently enabled reports.
- Returns
- True if all currently enabled reports were disabled successfully.

◆ dynamic_calibration_autosave_disable()
| bool BNO08x::dynamic_calibration_autosave_disable | ( | ) |
Disables the automatic saving of dynamic/ME calibration data to BNO08x internal flash See ref manual 6.4.7.1.
- Returns
- True if dynamic/ME calibration autosave data enable succeeded.
◆ dynamic_calibration_autosave_enable()
| bool BNO08x::dynamic_calibration_autosave_enable | ( | ) |
Enables the automatic saving of dynamic/ME calibration data to BNO08x internal flash See ref manual 6.4.7.1.
- Returns
- True if dynamic/ME calibration autosave data enable succeeded.
◆ dynamic_calibration_data_clear_ram()
| bool BNO08x::dynamic_calibration_data_clear_ram | ( | ) |
Clears dynamic/motion engine calibration data from ram and resets BNO08x device. See ref manual 6.4.9.1.
- Returns
- True if save dynamic/ME calibration data succeeded.


◆ dynamic_calibration_data_delete()
| bool BNO08x::dynamic_calibration_data_delete | ( | ) |
Deletes dynamic calibration data from BNO08x internal flash and resets the device. Follows the steps outlined in ref. manual 6.4.9.
- Returns
- True if delete dynamic calibration data operation succeeded.
◆ dynamic_calibration_disable()
| bool BNO08x::dynamic_calibration_disable | ( | BNO08xCalSel | sensor | ) |
Disables dynamic/motion engine calibration for specified sensor(s), see ref. manual 6.4.6.1.
- Parameters
-
sensor The sensor(s) to disable dynamic/ME calibration for.
- Returns
- True if disable dynamic/ME calibration succeeded.

◆ dynamic_calibration_enable()
| bool BNO08x::dynamic_calibration_enable | ( | BNO08xCalSel | sensor | ) |
Starts simple calibration, see ref. manual 6.4.10.1.
- Parameters
-
period_us This interval should be set to whatever rate the sensor hub is expected to run at after calibration.
After the calibration is started, the IMU should be rotated 180 degrees. After the IMU has been rotated call calibration_end(). See ref. manual 6.4.10 for more detailed instructions.
- Returns
- True if start simple calibration operation succeeded.
Ends turn-table calibration, see ref. manual 6.4.10.2
- Parameters
-
status Returned status bits indicating result of turntable calibration.
- Returns
- True if enable start turn-table calibration operation succeeded.
Enables dynamic/motion engine calibration for specified sensor(s), see ref. manual 6.4.6.1
- Parameters
-
sensor The sensor(s) to enable dynamic/ME calibration for.
- Returns
- True if enable dynamic/ME calibration succeeded.

◆ dynamic_calibration_run_routine()
| bool BNO08x::dynamic_calibration_run_routine | ( | ) |
Example calibration routine using dynamic/ME calibration commands.
Routine does the following:alignas
1) disables all enabled reports 2) sends a command to enable dynamic/motion engine calibration for all possible options (SH2_CAL_ACCEL | SH2_CAL_GYRO | SH2_CAL_MAG | SH2_CAL_PLANAR) 3) enables game rotation vector reports and calibrated magnetic field reports 4) moving window average for accuracy received through reports 5) deems calibration accuracy threshold met when magf accuracy avg is >=2 (MED) and quat accuracy avg >=3 (HIGH) for longer than 5 seconds 6) sends command to save dynamic calibration data 7) disables all enabled reports
Note the DCD commands don't have to be used this way, this is just an example, but the dynamic_calibration_autosave_enable() allows calibration to be run and saved constantly even while data is used for other operations.
- Returns
- True if calibration routine succeeded.
◆ dynamic_calibration_save()
| bool BNO08x::dynamic_calibration_save | ( | ) |
Saves dynamic/motion engine calibration data to BNO08x internal flash immediately. See ref manual 6.4.5.1.
- Returns
- True if save dynamic/ME calibration data succeeded.

◆ get_frs()
| bool BNO08x::get_frs | ( | BNO08xFrsID | frs_ID, |
| uint32_t(&) | data[16], | ||
| uint16_t & | rx_data_sz | ||
| ) |
Retrieves a record from flash record system (if your goal is to retrieve sensor specific meta data use the BNO08xRpt:get_meta_data() method instead)
For more details on returned and data and frs_IDs see ref. manual 6.3.7 & 4.3
- Parameters
-
frs_ID The ID of the desired record to retrieve from flash. data Buffer of 16 uint32_t to store retrieved data. rx_data_sz Reference to store number of 32 bit words retrieved from flash.
- Returns
- True if get flash record system operation succeeded.


◆ get_product_IDs()
| sh2_ProductIds_t BNO08x::get_product_IDs | ( | ) |
Returns product ID info sent by IMU at initialization.
- Returns
- The product ID info returned at initialization.
◆ get_reset_reason()
| BNO08xResetReason BNO08x::get_reset_reason | ( | ) |
Returns reason for previous reset via product ID report.
- Returns
- Enum object containing reset reason, BNO08xResetReason::UNDEFINED if failure.
◆ get_system_orientation()
| bool BNO08x::get_system_orientation | ( | float & | Qw, |
| float & | Qx, | ||
| float & | Qy, | ||
| float & | Qz | ||
| ) |
Retrieves the system orientation of the BNO08x device and converts to float.
- Parameters
-
Qw Reference to save real component of mapping quaternion. Qx Reference to save X (i) component of mapping quaternion. Qy Reference to save Y (j) component of mapping quaternion. Qz Reference to save Z (k) component of mapping quaternion.


◆ hard_reset()
| bool BNO08x::hard_reset | ( | ) |
Hard resets BNO08x device.
- Returns
- True if reset was success.


◆ initialize()
| bool BNO08x::initialize | ( | ) |
Initializes BNO08x sensor.
Resets sensor and goes through initialization process. Configures GPIO, required ISRs, and launches two tasks, one to manage SPI transactions, another to process any received data.
- Returns
- True if initialization was success, false if otherwise.
◆ on()
| bool BNO08x::on | ( | ) |
Places BNO08x device in on state by sending ON (2) command on "device" channel.
- Returns
- True if on operation succeeded.
◆ print_product_ids()
| void BNO08x::print_product_ids | ( | ) |
Prints product IDs received at initialization.
- Returns
- void, nothing to return
◆ print_system_orientation()
| void BNO08x::print_system_orientation | ( | ) |
Retrieves and prints system orientation.
- Returns
- void, nothing to return

◆ register_cb() [1/2]
| bool BNO08x::register_cb | ( | std::function< void(uint8_t report_ID)> | cb_fxn | ) |
Registers a callback to execute when new data from a report is received, overloaded with callback param for most recent report ID.
- Parameters
-
cb_fxn Pointer to the call-back function should be of void return type with single input param of uint8_t for most recent report ID.
- Returns
- void, nothing to return
◆ register_cb() [2/2]
| bool BNO08x::register_cb | ( | std::function< void(void)> | cb_fxn | ) |
Registers a callback to execute when new data from a report is received.
- Parameters
-
cb_fxn Pointer to the call-back function should be of void return type void input param.
- Returns
- void, nothing to return
◆ set_system_orientation()
| bool BNO08x::set_system_orientation | ( | float | Qw, |
| float | Qx, | ||
| float | Qy, | ||
| float | Qz | ||
| ) |
Sets the system orientation of the BNO08x device and persist it in flash (FRS).
- Note
- Datasheet Figure 4.3 for reference of physical mounting position relative to mapping quaternion.
- Use SQRT2OVER2 as a constant for sqrt(2)/2
- that a reset is required to apply changes.
- This configuration seems only to work if reports are already enabled. e.g. set .rpt.rv.enable(PERIOD) prior this call
- Parameters
-
Qw Real component of mapping quaternion. Qx X (i) component of mapping quaternion. Qy Y (j) component of mapping quaternion. Qz Z (k) component of mapping quaternion.
◆ sleep()
| bool BNO08x::sleep | ( | ) |
Places BNO08x device in sleep state by sending SLEEP (3) command on "device" channel.
- Returns
- True if sleep operation succeeded.
◆ soft_reset()
| bool BNO08x::soft_reset | ( | ) |
Soft resets BNO08x device by sending RESET (1) command on "device" channel.
- Returns
- True if soft reset operation succeeded.

◆ write_frs()
| bool BNO08x::write_frs | ( | BNO08xFrsID | frs_ID, |
| uint32_t * | data, | ||
| const uint16_t | tx_data_sz | ||
| ) |
Writes a record to flash record system.
For more details on flash records and frs_IDs see ref. manual 6.3.6 & 4.3
- Parameters
-
frs_ID The ID of the desired to write to flash. data Buffer of 16 uint32_t to store data to send. tx_data_sz Length of data, amount of 32 bit words to write to flash.
- Returns
- True if get flash record system operation succeeded.


Friends And Related Function Documentation
◆ BNO08xSH2HAL
|
friend |
◆ BNO08xTestHelper
|
friend |
Member Data Documentation
◆ rpt
| bno08x_reports_t BNO08x::rpt |
◆ SQRT2OVER2
|
staticconstexpr |
The documentation for this class was generated from the following files:
- /media/develop/git/imu_pr_cleanup/components/esp32_BNO08x/include/BNO08x.hpp
- BNO08x.cpp