BNO08x IMU driver class. More...
#include <BNO08x.hpp>
Classes | |
| struct | bno08x_init_status_t |
| Holds info about which functionality has been successfully initialized (used by deconstructor during cleanup). More... | |
| struct | bno08x_report_period_tracker_t |
| struct | bno08x_rx_packet_t |
| Holds data that is received over spi. More... | |
| struct | bno08x_tx_packet_t |
| Holds data that is sent over spi. More... | |
Public Member Functions | |
| BNO08x (bno08x_config_t imu_config=bno08x_config_t()) | |
| BNO08x imu constructor. | |
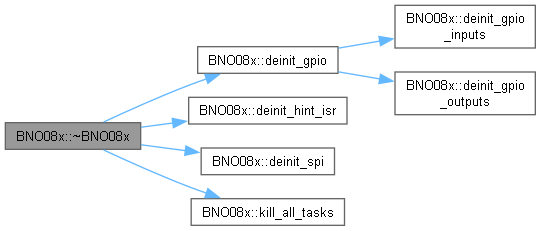
| ~BNO08x () | |
| BNO08x imu deconstructor. | |
| bool | initialize () |
| Initializes BNO08x sensor. | |
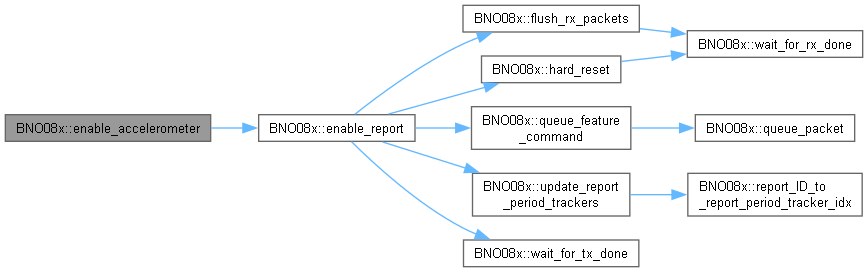
| bool | hard_reset () |
| Hard resets BNO08x sensor. | |
| bool | soft_reset () |
| Soft resets BNO08x sensor using executable channel. | |
| BNO08xResetReason | get_reset_reason () |
| Requests product ID, prints the returned info over serial, and returns the reason for the most resent reset. | |
| bool | mode_sleep () |
| Puts BNO08x sensor into sleep/low power mode using executable channel. | |
| bool | mode_on () |
| Turns on/ brings BNO08x sensor out of sleep mode using executable channel. | |
| float | q_to_float (int16_t fixed_point_value, uint8_t q_point) |
| Converts a register value to a float using its associated Q point. (See https://en.wikipedia.org/wiki/Q_(number_format)) | |
| bool | run_full_calibration_routine () |
| Runs full calibration routine. | |
| void | calibrate_all () |
| Sends command to calibrate accelerometer, gyro, and magnetometer. | |
| void | calibrate_accelerometer () |
| Sends command to calibrate accelerometer. | |
| void | calibrate_gyro () |
| Sends command to calibrate gyro. | |
| void | calibrate_magnetometer () |
| Sends command to calibrate magnetometer. | |
| void | calibrate_planar_accelerometer () |
| Sends command to calibrate planar accelerometer. | |
| void | request_calibration_status () |
| Requests ME calibration status from BNO08x (see Ref. Manual 6.4.7.2) | |
| bool | calibration_complete () |
| Returns true if calibration has completed. | |
| void | end_calibration () |
| Sends command to end calibration procedure. | |
| void | save_calibration () |
| Sends command to save internal calibration data (See Ref. Manual 6.4.7). | |
| void | enable_rotation_vector (uint32_t time_between_reports) |
| Sends command to enable rotation vector reports (See Ref. Manual 6.5.18) | |
| void | enable_game_rotation_vector (uint32_t time_between_reports) |
| Sends command to enable game rotation vector reports (See Ref. Manual 6.5.19) | |
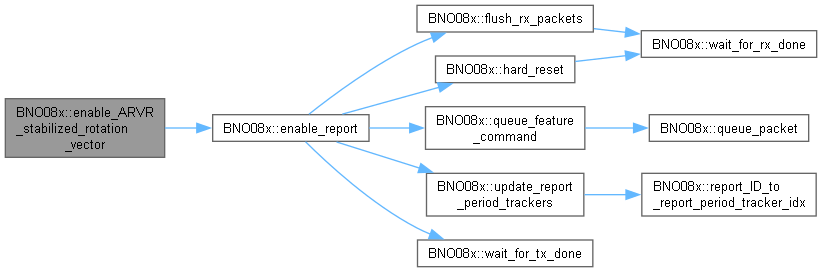
| void | enable_ARVR_stabilized_rotation_vector (uint32_t time_between_reports) |
| Sends command to enable ARVR stabilized rotation vector reports (See Ref. Manual 6.5.42) | |
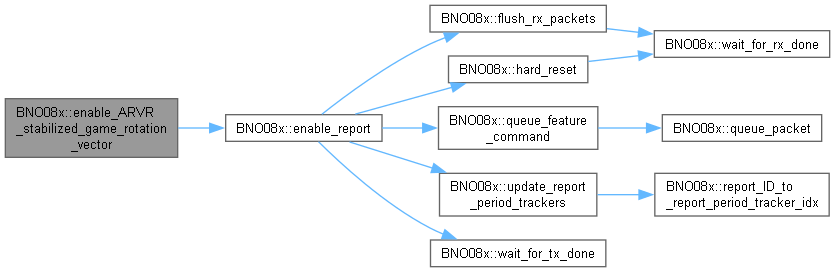
| void | enable_ARVR_stabilized_game_rotation_vector (uint32_t time_between_reports) |
| Sends command to enable ARVR stabilized game rotation vector reports (See Ref. Manual 6.5.43) | |
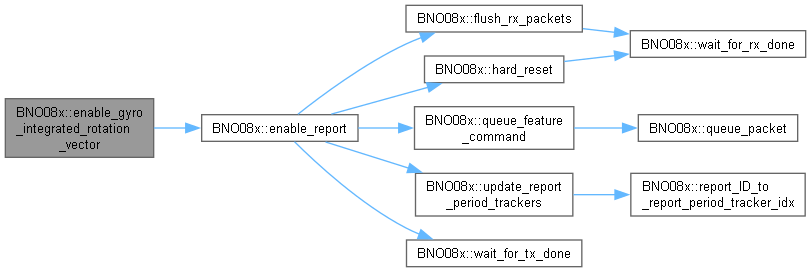
| void | enable_gyro_integrated_rotation_vector (uint32_t time_between_reports) |
| Sends command to enable gyro integrated rotation vector reports (See Ref. Manual 6.5.44) | |
| void | enable_uncalibrated_gyro (uint32_t time_between_reports) |
| Sends command to enable uncalibrated gyro reports (See Ref. Manual 6.5.14) | |
| void | enable_calibrated_gyro (uint32_t time_between_reports) |
| Sends command to enable calibrated gyro reports (See Ref. Manual 6.5.13) | |
| void | enable_accelerometer (uint32_t time_between_reports) |
| Sends command to enable accelerometer reports (See Ref. Manual 6.5.9) | |
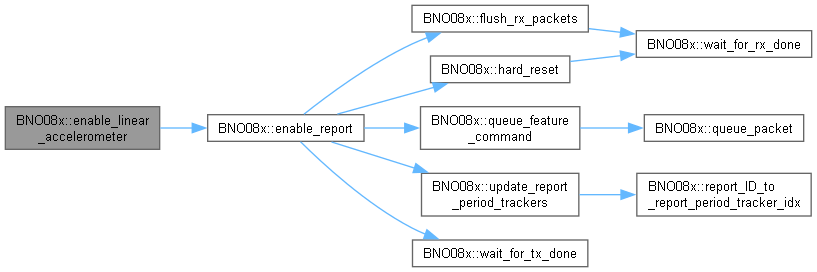
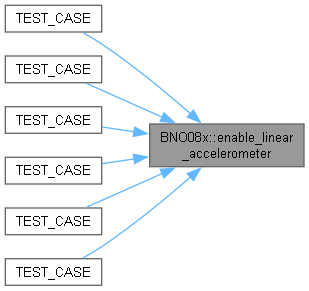
| void | enable_linear_accelerometer (uint32_t time_between_reports) |
| Sends command to enable linear accelerometer reports (See Ref. Manual 6.5.10) | |
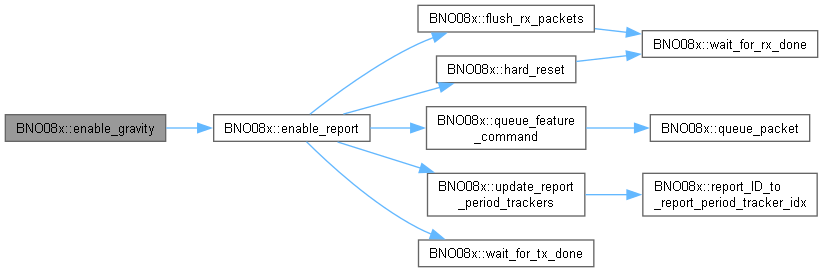
| void | enable_gravity (uint32_t time_between_reports) |
| Sends command to enable gravity reading reports (See Ref. Manual 6.5.11) | |
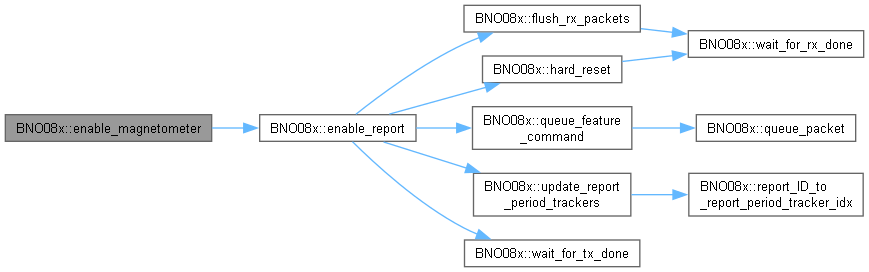
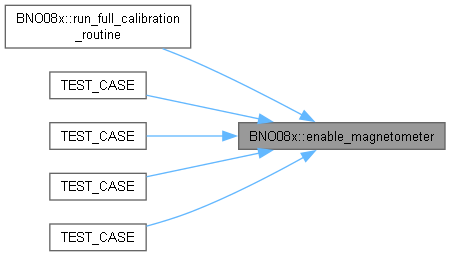
| void | enable_magnetometer (uint32_t time_between_reports) |
| Sends command to enable magnetometer reports (See Ref. Manual 6.5.16) | |
| void | enable_tap_detector (uint32_t time_between_reports) |
| Sends command to enable tap detector reports (See Ref. Manual 6.5.27) | |
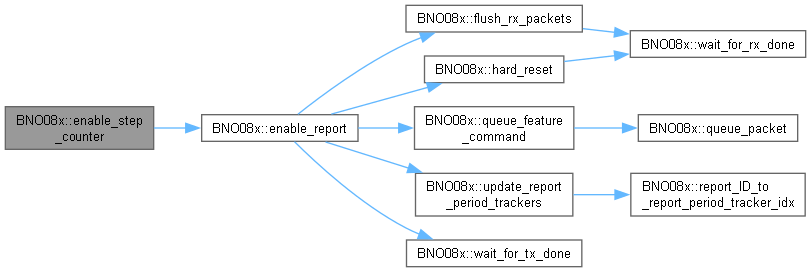
| void | enable_step_counter (uint32_t time_between_reports) |
| Sends command to enable step counter reports (See Ref. Manual 6.5.29) | |
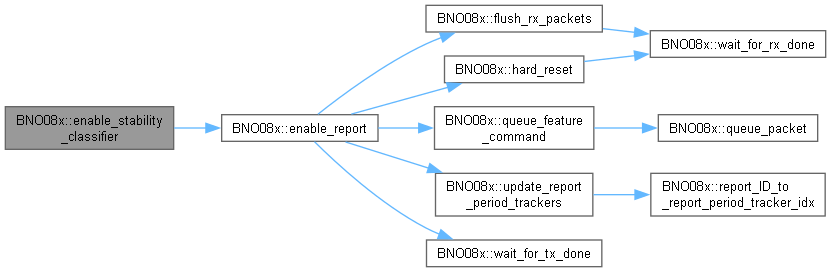
| void | enable_stability_classifier (uint32_t time_between_reports) |
| Sends command to enable activity stability classifier reports (See Ref. Manual 6.5.31) | |
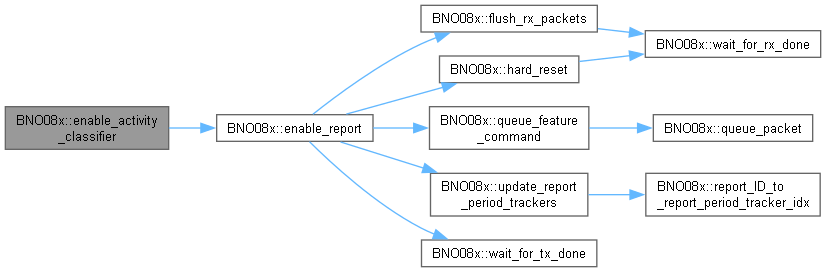
| void | enable_activity_classifier (uint32_t time_between_reports, BNO08xActivityEnable activities_to_enable, uint8_t(&activity_confidence_vals)[9]) |
| Sends command to enable activity classifier reports (See Ref. Manual 6.5.36) | |
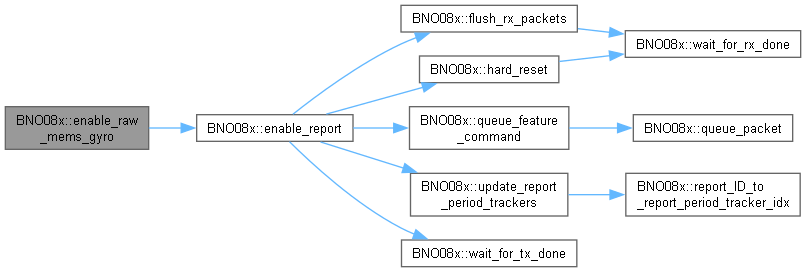
| void | enable_raw_mems_gyro (uint32_t time_between_reports) |
| Sends command to enable raw MEMs gyro reports (See Ref. Manual 6.5.12) | |
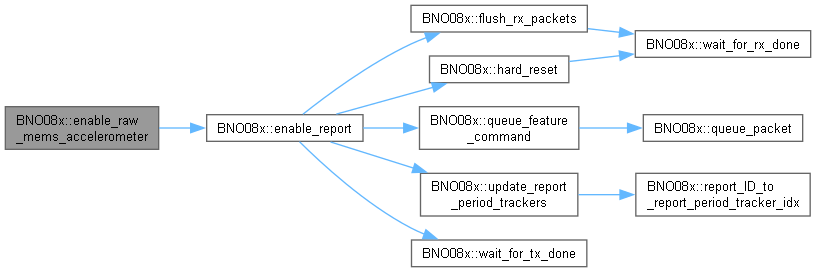
| void | enable_raw_mems_accelerometer (uint32_t time_between_reports) |
| Sends command to enable raw MEMs accelerometer reports (See Ref. Manual 6.5.8) | |
| void | enable_raw_mems_magnetometer (uint32_t time_between_reports) |
| Sends command to enable raw MEMs magnetometer reports (See Ref. Manual 6.5.15) | |
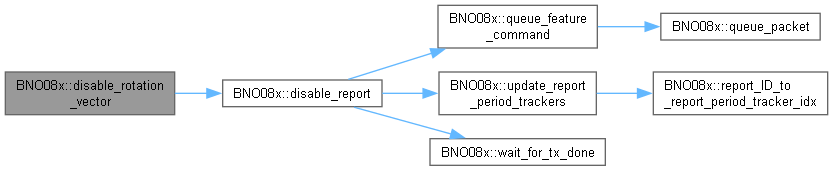
| void | disable_rotation_vector () |
| Sends command to disable rotation vector reports by setting report interval to 0. | |
| void | disable_game_rotation_vector () |
| Sends command to disable game rotation vector reports by setting report interval to 0. | |
| void | disable_ARVR_stabilized_rotation_vector () |
| Sends command to disable ARVR stabilized rotation vector reports by setting report interval to 0. | |
| void | disable_ARVR_stabilized_game_rotation_vector () |
| Sends command to disable ARVR stabilized game rotation vector reports by setting report interval to 0. | |
| void | disable_gyro_integrated_rotation_vector () |
| Sends command to disable gyro integrated rotation vector reports by setting report interval to 0. | |
| void | disable_accelerometer () |
| Sends command to disable accelerometer reports by setting report interval to 0. | |
| void | disable_linear_accelerometer () |
| Sends command to disable linear accelerometer reports by setting report interval to 0. | |
| void | disable_gravity () |
| Sends command to disable gravity reports by setting report interval to 0. | |
| void | disable_calibrated_gyro () |
| Sends command to disable calibrated gyro reports by setting report interval to 0. | |
| void | disable_uncalibrated_gyro () |
| Sends command to disable uncalibrated gyro reports by setting report interval to 0. | |
| void | disable_magnetometer () |
| Sends command to disable magnetometer reports by setting report interval to 0. | |
| void | disable_step_counter () |
| Sends command to disable step counter reports by setting report interval to 0. | |
| void | disable_stability_classifier () |
| Sends command to disable stability reports by setting report interval to 0. | |
| void | disable_activity_classifier () |
| Sends command to disable activity classifier reports by setting report interval to 0. | |
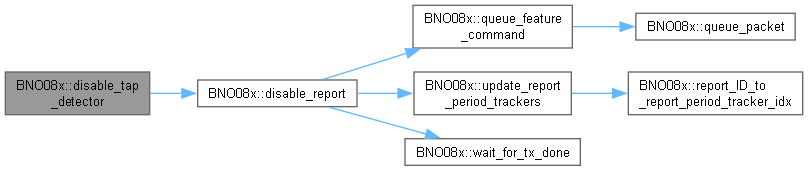
| void | disable_tap_detector () |
| Sends command to disable tap detector reports by setting report interval to 0. | |
| void | disable_raw_mems_accelerometer () |
| Sends command to disable raw accelerometer reports by setting report interval to 0. | |
| void | disable_raw_mems_gyro () |
| Sends command to disable raw gyro reports by setting report interval to 0. | |
| void | disable_raw_mems_magnetometer () |
| Sends command to disable raw magnetometer reports by setting report interval to 0. | |
| void | tare_now (uint8_t axis_sel=TARE_AXIS_ALL, uint8_t rotation_vector_basis=TARE_ROTATION_VECTOR) |
| Sends command to tare an axis (See Ref. Manual 6.4.4.1) | |
| void | save_tare () |
| Sends command to save tare into non-volatile memory of BNO08x (See Ref. Manual 6.4.4.2) | |
| void | clear_tare () |
| Sends command to clear persistent tare settings in non-volatile memory of BNO08x (See Ref. Manual 6.4.4.3) | |
| bool | data_available (bool ignore_no_reports_enabled=false) |
| Checks if BNO08x has asserted interrupt and sent data. | |
| void | register_cb (std::function< void()> cb_fxn) |
| Registers a callback to execute when new data from a report is received. | |
| void | reset_all_data_to_defaults () |
| Resets all data returned by public getter APIs to initial values of 0 and low accuracy. | |
| uint32_t | get_time_stamp () |
| Return timestamp of most recent report. | |
| void | get_magf (float &x, float &y, float &z, BNO08xAccuracy &accuracy) |
| Get the full magnetic field vector. | |
| float | get_magf_X () |
| Get X component of magnetic field vector. | |
| float | get_magf_Y () |
| Get Y component of magnetic field vector. | |
| float | get_magf_Z () |
| Get Z component of magnetic field vector. | |
| BNO08xAccuracy | get_magf_accuracy () |
| Get accuracy of reported magnetic field vector. | |
| void | get_gravity (float &x, float &y, float &z, BNO08xAccuracy &accuracy) |
| Get full reported gravity vector, units in m/s^2. | |
| float | get_gravity_X () |
| Get the reported x axis gravity. | |
| float | get_gravity_Y () |
| Get the reported y axis gravity. | |
| float | get_gravity_Z () |
| Get the reported z axis gravity. | |
| BNO08xAccuracy | get_gravity_accuracy () |
| Get the reported gravity accuracy. | |
| float | get_roll () |
| Get the reported rotation about x axis. | |
| float | get_pitch () |
| Get the reported rotation about y axis. | |
| float | get_yaw () |
| Get the reported rotation about z axis. | |
| float | get_roll_deg () |
| Get the reported rotation about x axis. | |
| float | get_pitch_deg () |
| Get the reported rotation about y axis. | |
| float | get_yaw_deg () |
| Get the reported rotation about z axis. | |
| void | get_quat (float &i, float &j, float &k, float &real, float &rad_accuracy, BNO08xAccuracy &accuracy) |
| Get the full quaternion reading. | |
| float | get_quat_I () |
| Get I component of reported quaternion. | |
| float | get_quat_J () |
| Get J component of reported quaternion. | |
| float | get_quat_K () |
| Get K component of reported quaternion. | |
| float | get_quat_real () |
| Get real component of reported quaternion. | |
| float | get_quat_radian_accuracy () |
| Get radian accuracy of reported quaternion. | |
| BNO08xAccuracy | get_quat_accuracy () |
| Get accuracy of reported quaternion. | |
| void | get_accel (float &x, float &y, float &z, BNO08xAccuracy &accuracy) |
| Get full acceleration (total acceleration of device, units in m/s^2). | |
| float | get_accel_X () |
| Get x axis acceleration (total acceleration of device, units in m/s^2). | |
| float | get_accel_Y () |
| Get y axis acceleration (total acceleration of device, units in m/s^2). | |
| float | get_accel_Z () |
| Get z axis acceleration (total acceleration of device, units in m/s^2). | |
| BNO08xAccuracy | get_accel_accuracy () |
| Get accuracy of linear acceleration. | |
| void | get_linear_accel (float &x, float &y, float &z, BNO08xAccuracy &accuracy) |
| Get full linear acceleration (acceleration of the device minus gravity, units in m/s^2). | |
| float | get_linear_accel_X () |
| Get x axis linear acceleration (acceleration of device minus gravity, units in m/s^2) | |
| float | get_linear_accel_Y () |
| Get y axis linear acceleration (acceleration of device minus gravity, units in m/s^2) | |
| float | get_linear_accel_Z () |
| Get z axis linear acceleration (acceleration of device minus gravity, units in m/s^2) | |
| BNO08xAccuracy | get_linear_accel_accuracy () |
| Get accuracy of linear acceleration. | |
| void | get_raw_mems_accel (uint16_t &x, uint16_t &y, uint16_t &z) |
| Get full raw acceleration from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8). | |
| uint16_t | get_raw_mems_accel_X () |
| Get raw accelerometer x axis reading from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8) | |
| uint16_t | get_raw_mems_accel_Y () |
| Get raw accelerometer y axis reading from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8) | |
| uint16_t | get_raw_mems_accel_Z () |
| Get raw accelerometer z axis reading from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8) | |
| void | get_raw_mems_gyro (uint16_t &x, uint16_t &y, uint16_t &z) |
| Get raw gyroscope full reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12) | |
| uint16_t | get_raw_mems_gyro_X () |
| Get raw gyroscope x axis reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12) | |
| uint16_t | get_raw_mems_gyro_Y () |
| Get raw gyroscope y axis reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12) | |
| uint16_t | get_raw_mems_gyro_Z () |
| Get raw gyroscope z axis reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12) | |
| void | get_raw_mems_magf (uint16_t &x, uint16_t &y, uint16_t &z) |
| Get raw magnetometer full reading from physical magnetometer sensor (See Ref. Manual 6.5.15) | |
| uint16_t | get_raw_mems_magf_X () |
| Get raw magnetometer x axis reading from physical magnetometer sensor (See Ref. Manual 6.5.15) | |
| uint16_t | get_raw_mems_magf_Y () |
| Get raw magnetometer y axis reading from physical magnetometer sensor (See Ref. Manual 6.5.15) | |
| uint16_t | get_raw_mems_magf_Z () |
| Get raw magnetometer z axis reading from physical magnetometer sensor (See Ref. Manual 6.5.15) | |
| void | get_calibrated_gyro_velocity (float &x, float &y, float &z) |
| Get full rotational velocity with drift compensation (units in Rad/s). | |
| float | get_calibrated_gyro_velocity_X () |
| Get calibrated gyro x axis angular velocity measurement. | |
| float | get_calibrated_gyro_velocity_Y () |
| Get calibrated gyro y axis angular velocity measurement. | |
| float | get_calibrated_gyro_velocity_Z () |
| Get calibrated gyro z axis angular velocity measurement. | |
| void | get_uncalibrated_gyro_velocity (float &x, float &y, float &z, float &bx, float &by, float &bz) |
| Get full rotational velocity without drift compensation (units in Rad/s). An estimate of drift is given but not applied. | |
| float | get_uncalibrated_gyro_velocity_X () |
| Get uncalibrated gyro x axis angular velocity measurement. | |
| float | get_uncalibrated_gyro_velocity_Y () |
| Get uncalibrated gyro Y axis angular velocity measurement. | |
| float | get_uncalibrated_gyro_velocity_Z () |
| Get uncalibrated gyro Z axis angular velocity measurement. | |
| float | get_uncalibrated_gyro_bias_X () |
| Get uncalibrated gyro x axis drift estimate. | |
| float | get_uncalibrated_gyro_bias_Y () |
| Get uncalibrated gyro Y axis drift estimate. | |
| float | get_uncalibrated_gyro_bias_Z () |
| Get uncalibrated gyro Z axis drift estimate. | |
| void | get_integrated_gyro_velocity (float &x, float &y, float &z) |
| Full rotational velocity from gyro-integrated rotation vector (See Ref. Manual 6.5.44) | |
| float | get_integrated_gyro_velocity_X () |
| Get x axis angular velocity from gyro-integrated rotation vector. (See Ref. Manual 6.5.44) | |
| float | get_integrated_gyro_velocity_Y () |
| Get y axis angular velocity from gyro-integrated rotation vector. (See Ref. Manual 6.5.44) | |
| float | get_integrated_gyro_velocity_Z () |
| Get z axis angular velocity from gyro-integrated rotation vector. (See Ref. Manual 6.5.44) | |
| uint8_t | get_tap_detector () |
| Get if tap has occured. | |
| uint16_t | get_step_count () |
| Get the counted amount of steps. | |
| BNO08xStability | get_stability_classifier () |
| Get the current stability classifier (Seee Ref. Manual 6.5.31) | |
| BNO08xActivity | get_activity_classifier () |
| Get the current activity classifier (Seee Ref. Manual 6.5.36) | |
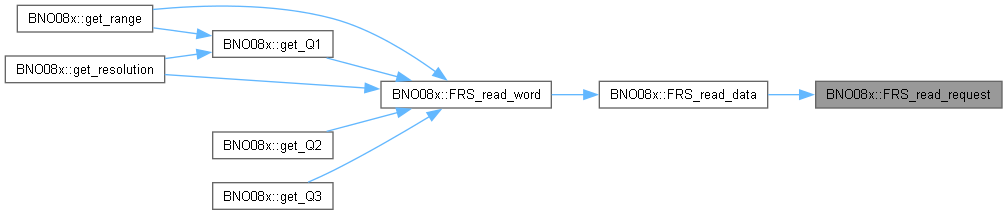
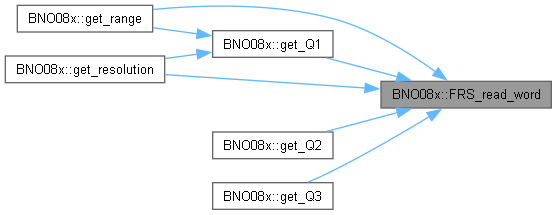
| int16_t | get_Q1 (uint16_t record_ID) |
| Gets Q1 point from BNO08x FRS (flash record system). | |
| int16_t | get_Q2 (uint16_t record_ID) |
| Gets Q2 point from BNO08x FRS (flash record system). | |
| int16_t | get_Q3 (uint16_t record_ID) |
| Gets Q3 point from BNO08x FRS (flash record system). | |
| float | get_resolution (uint16_t record_ID) |
| Gets resolution from BNO08x FRS (flash record system). | |
| float | get_range (uint16_t record_ID) |
| Gets range from BNO08x FRS (flash record system). | |
| uint32_t | FRS_read_word (uint16_t record_ID, uint8_t word_number) |
| Reads meta data word from BNO08x FRS (flash record system) given the record ID and word number. (See Ref. Manual 5.1 & 6.3.7) | |
| bool | FRS_read_request (uint16_t record_ID, uint16_t read_offset, uint16_t block_size) |
| Requests meta data from BNO08x FRS (flash record system) given the record ID. Contains Q points and other info. (See Ref. Manual 5.1 & 6.3.6) | |
| bool | FRS_read_data (uint16_t record_ID, uint8_t start_location, uint8_t words_to_read) |
| Read meta data from BNO08x FRS (flash record system) given the record ID. Contains Q points and other info. (See Ref. Manual 5.1 & 6.3.7) | |
Static Public Attributes | |
| static const constexpr uint16_t | FRS_RECORD_ID_ACCELEROMETER |
| Accelerometer record ID, to be passed in metadata functions like get_Q1() | |
| static const constexpr uint16_t | FRS_RECORD_ID_GYROSCOPE_CALIBRATED |
| Calirated gyroscope record ID, to be passed in metadata functions like get_Q1() | |
| static const constexpr uint16_t | FRS_RECORD_ID_MAGNETIC_FIELD_CALIBRATED |
| Calibrated magnetometer record ID, to be passed in metadata functions like get_Q1() | |
| static const constexpr uint16_t | FRS_RECORD_ID_ROTATION_VECTOR |
| Rotation vector record ID, to be passed in metadata functions like get_Q1() | |
| static const constexpr uint8_t | TARE_AXIS_ALL = 0x07U |
| Tare all axes (used with tare now command) | |
| static const constexpr uint8_t | TARE_AXIS_Z = 0x04U |
| Tar yaw axis only (used with tare now command) | |
| static const constexpr uint8_t | TARE_ROTATION_VECTOR = 0U |
| Tare rotation vector. | |
| static const constexpr uint8_t | TARE_GAME_ROTATION_VECTOR = 1U |
| Tare game rotation vector. | |
| static const constexpr uint8_t | TARE_GEOMAGNETIC_ROTATION_VECTOR = 2U |
| tare geomagnetic rotation vector | |
| static const constexpr uint8_t | TARE_GYRO_INTEGRATED_ROTATION_VECTOR = 3U |
| Tare gyro integrated rotation vector. | |
| static const constexpr uint8_t | TARE_ARVR_STABILIZED_ROTATION_VECTOR = 4U |
| Tare ARVR stabilized rotation vector. | |
| static const constexpr uint8_t | TARE_ARVR_STABILIZED_GAME_ROTATION_VECTOR = 5U |
| Tare ARVR stabilized game rotation vector. | |
| static const constexpr int16_t | ROTATION_VECTOR_Q1 = 14 |
| Rotation vector Q point (See SH-2 Ref. Manual 6.5.18) | |
| static const constexpr int16_t | ROTATION_VECTOR_ACCURACY_Q1 = 12 |
| Rotation vector accuracy estimate Q point (See SH-2 Ref. Manual 6.5.18) | |
| static const constexpr int16_t | ACCELEROMETER_Q1 = 8 |
| Acceleration Q point (See SH-2 Ref. Manual 6.5.9) | |
| static const constexpr int16_t | LINEAR_ACCELEROMETER_Q1 = 8 |
| Linear acceleration Q point (See SH-2 Ref. Manual 6.5.10) | |
| static const constexpr int16_t | GYRO_Q1 = 9 |
| Gyro Q point (See SH-2 Ref. Manual 6.5.13) | |
| static const constexpr int16_t | MAGNETOMETER_Q1 = 4 |
| Magnetometer Q point (See SH-2 Ref. Manual 6.5.16) | |
| static const constexpr int16_t | ANGULAR_VELOCITY_Q1 = 10 |
| Angular velocity Q point (See SH-2 Ref. Manual 6.5.44) | |
| static const constexpr int16_t | GRAVITY_Q1 = 8 |
| Gravity Q point (See SH-2 Ref. Manual 6.5.11) | |
Private Types | |
| enum | channels_t { CHANNEL_COMMAND , CHANNEL_EXECUTABLE , CHANNEL_CONTROL , CHANNEL_REPORTS , CHANNEL_WAKE_REPORTS , CHANNEL_GYRO } |
| SHTP protocol channels. More... | |
| typedef struct BNO08x::bno08x_rx_packet_t | bno08x_rx_packet_t |
| Holds data that is received over spi. | |
| typedef struct BNO08x::bno08x_tx_packet_t | bno08x_tx_packet_t |
| Holds data that is sent over spi. | |
| typedef struct BNO08x::bno08x_report_period_tracker_t | bno08x_report_period_tracker_t |
| typedef struct BNO08x::bno08x_init_status_t | bno08x_init_status_t |
| Holds info about which functionality has been successfully initialized (used by deconstructor during cleanup). | |
Private Member Functions | |
| esp_err_t | init_config_args () |
| Initializes required esp-idf SPI data structures with values from user passed bno08x_config_t struct. | |
| esp_err_t | init_gpio () |
| Initializes required gpio. | |
| esp_err_t | init_gpio_inputs () |
| Initializes required gpio inputs. | |
| esp_err_t | init_gpio_outputs () |
| Initializes required gpio outputs. | |
| esp_err_t | init_hint_isr () |
| Initializes host interrupt ISR. | |
| esp_err_t | init_spi () |
| Initializes SPI. | |
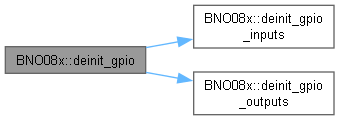
| esp_err_t | deinit_gpio () |
| Deinitializes GPIO, called from deconstructor. | |
| esp_err_t | deinit_gpio_inputs () |
| Deinitializes GPIO inputs, called from deconstructor. | |
| esp_err_t | deinit_gpio_outputs () |
| Deinitializes GPIO outputs, called from deconstructor. | |
| esp_err_t | deinit_hint_isr () |
| Deinitializes host interrupt ISR, called from deconstructor. | |
| esp_err_t | deinit_spi () |
| Deinitializes SPI. | |
| bool | wait_for_rx_done () |
| Waits for data to be received over SPI, or host_int_timeout_ms to elapse. | |
| bool | wait_for_tx_done () |
| Waits for a queued packet to be sent or host_int_timeout_ms to elapse. | |
| bool | wait_for_data () |
| Waits for a valid or invalid packet to be received or host_int_timeout_ms to elapse. | |
| esp_err_t | receive_packet () |
| Receives a SHTP packet via SPI and sends it to data_proc_task() | |
| esp_err_t | receive_packet_header (bno08x_rx_packet_t *packet) |
| Receives a SHTP packet header via SPI. | |
| esp_err_t | receive_packet_body (bno08x_rx_packet_t *packet) |
| Receives a SHTP packet body via SPI. | |
| void | send_packet (bno08x_tx_packet_t *packet) |
| Sends a queued SHTP packet via SPI. | |
| void | flush_rx_packets (uint8_t flush_count) |
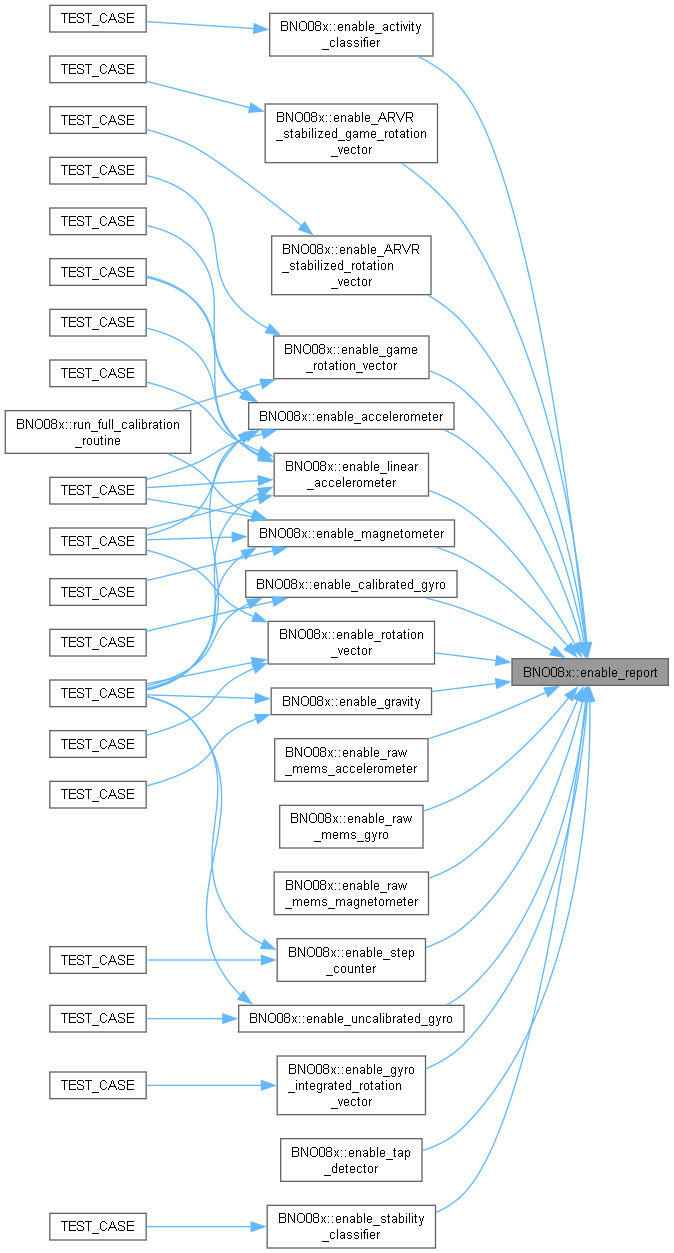
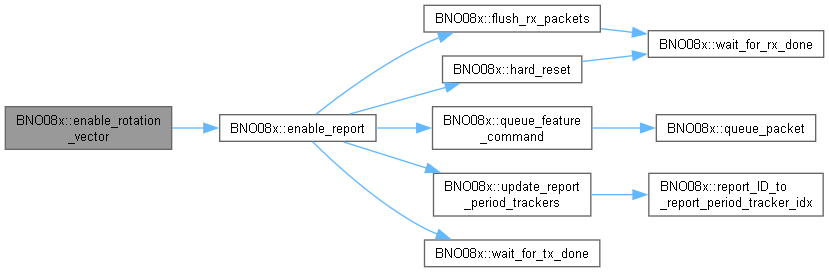
| void | enable_report (uint8_t report_ID, uint32_t time_between_reports, const EventBits_t report_evt_grp_bit, uint32_t special_config=0) |
| Enables a sensor report for a given ID. | |
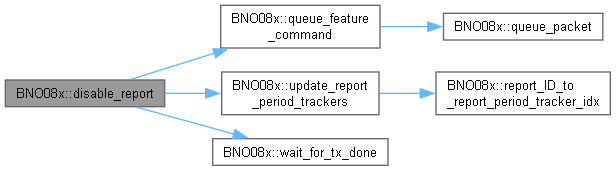
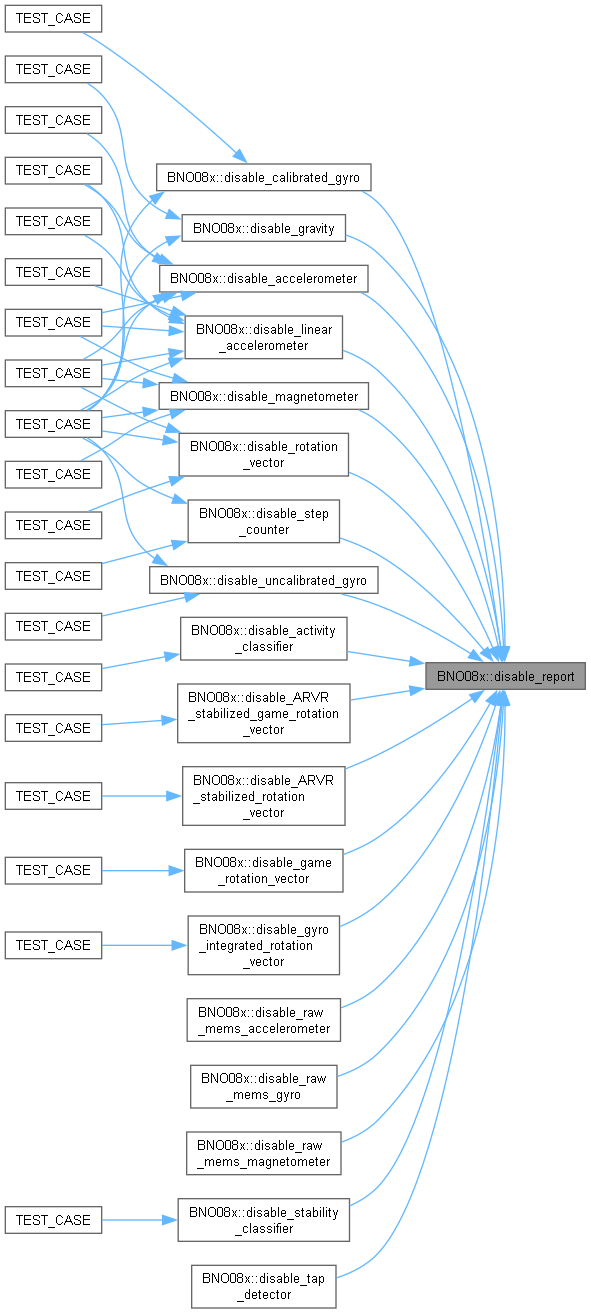
| void | disable_report (uint8_t report_ID, const EventBits_t report_evt_grp_bit) |
| Disables a sensor report for a given ID by setting its time interval to 0. | |
| void | queue_packet (uint8_t channel_number, uint8_t data_length, uint8_t *commands) |
| Queues an SHTP packet to be sent via SPI. | |
| void | queue_command (uint8_t command, uint8_t *commands) |
| Queues a packet containing a command. | |
| void | queue_feature_command (uint8_t report_ID, uint32_t time_between_reports, uint32_t specific_config=0) |
| Queues a packet containing a command with a request for sensor reports, reported periodically. (See Ref. Manual 6.5.4) | |
| void | queue_calibrate_command (uint8_t _to_calibrate) |
| Queues a packet containing a command to calibrate the specified sensor. | |
| void | queue_tare_command (uint8_t command, uint8_t axis=TARE_AXIS_ALL, uint8_t rotation_vector_basis=TARE_ROTATION_VECTOR) |
| Queues a packet containing a command related to zeroing sensor's axes. (See Ref. Manual 6.4.4.1) | |
| void | queue_request_product_id_command () |
| Queues a packet containing the request product ID command. | |
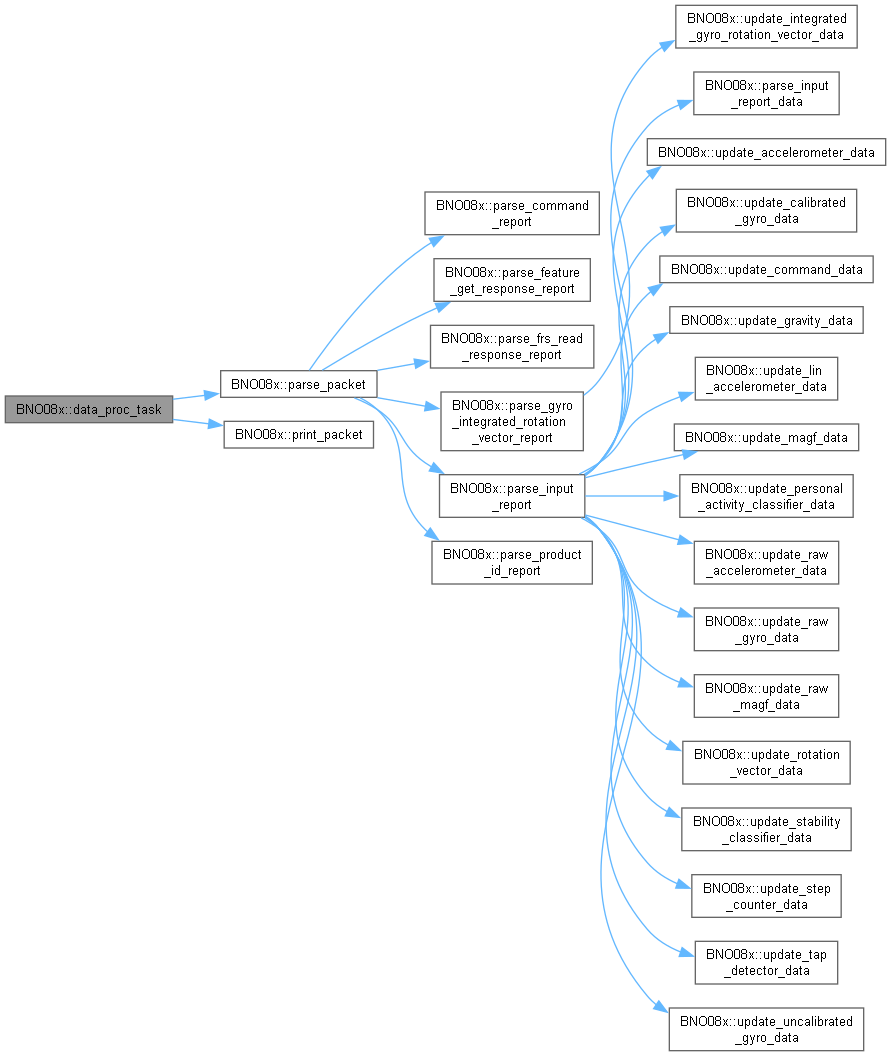
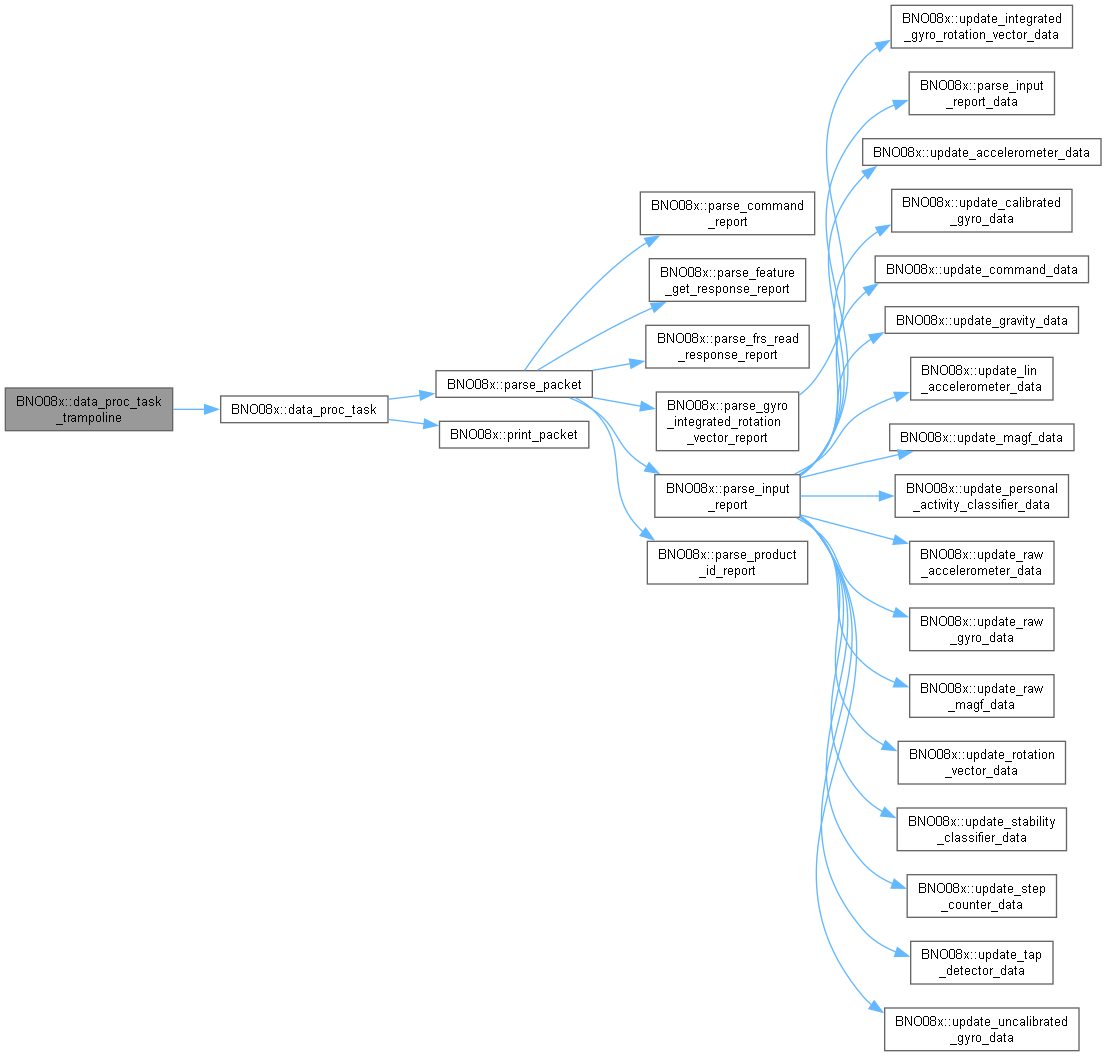
| uint16_t | parse_packet (bno08x_rx_packet_t *packet, bool ¬ify_users) |
| Parses a packet received from bno08x, updating any data according to received reports. | |
| uint16_t | parse_product_id_report (bno08x_rx_packet_t *packet) |
| Parses product id report and prints device info. | |
| uint16_t | parse_frs_read_response_report (bno08x_rx_packet_t *packet) |
| Sends packet to be parsed to meta data function call (FRS_read_data()) through queue. | |
| uint16_t | parse_feature_get_response_report (bno08x_rx_packet_t *packet) |
| Parses get feature request report received from BNO08x. | |
| uint16_t | parse_input_report (bno08x_rx_packet_t *packet) |
| Parses received input report sent by BNO08x. | |
| void | parse_input_report_data (bno08x_rx_packet_t *packet, uint16_t *data, uint16_t data_length) |
| Parses data from received input report. | |
| uint16_t | parse_gyro_integrated_rotation_vector_report (bno08x_rx_packet_t *packet) |
| Parses received gyro integrated rotation vector report sent by BNO08x. | |
| uint16_t | parse_command_report (bno08x_rx_packet_t *packet) |
| Parses received command report sent by BNO08x (See Ref. Manual 6.3.9) | |
| void | update_accelerometer_data (uint16_t *data, uint8_t status) |
| Updates accelerometer data from parsed input report. | |
| void | update_lin_accelerometer_data (uint16_t *data, uint8_t status) |
| Updates linear accelerometer data from parsed input report. | |
| void | update_calibrated_gyro_data (uint16_t *data, uint8_t status) |
| Updates linear gyro data from parsed input report. | |
| void | update_uncalibrated_gyro_data (uint16_t *data, uint8_t status) |
| Updates uncalibrated gyro data from parsed input report. | |
| void | update_magf_data (uint16_t *data, uint8_t status) |
| Updates magnetic field data from parsed input report. | |
| void | update_gravity_data (uint16_t *data, uint8_t status) |
| Updates gravity data from parsed input report. | |
| void | update_rotation_vector_data (uint16_t *data, uint8_t status) |
| Updates roation vector data from parsed input report. | |
| void | update_step_counter_data (uint16_t *data) |
| Updates step counter data from parsed input report. | |
| void | update_raw_accelerometer_data (uint16_t *data) |
| Updates raw accelerometer data from parsed input report. | |
| void | update_raw_gyro_data (uint16_t *data) |
| Updates raw gyro data from parsed input report. | |
| void | update_raw_magf_data (uint16_t *data) |
| Updates raw magnetic field data from parsed input report. | |
| void | update_tap_detector_data (bno08x_rx_packet_t *packet) |
| Updates tap detector data from parsed input report. | |
| void | update_stability_classifier_data (bno08x_rx_packet_t *packet) |
| Updates stability classifier data from parsed input report. | |
| void | update_personal_activity_classifier_data (bno08x_rx_packet_t *packet) |
| Updates activity classifier data from parsed input report. | |
| void | update_command_data (bno08x_rx_packet_t *packet) |
| Updates command data from parsed input report. | |
| void | update_integrated_gyro_rotation_vector_data (bno08x_rx_packet_t *packet) |
| Updates integrated gyro rotation vector data from SHTP channel 5 (CHANNEL_GYRO) special report data. | |
| void | print_header (bno08x_rx_packet_t *packet) |
| Prints the header of the passed SHTP packet to serial console with ESP_LOG statement. | |
| void | print_packet (bno08x_rx_packet_t *packet) |
| Prints the passed SHTP packet to serial console with ESP_LOG statement. | |
| void | spi_task () |
| Task responsible for SPI transactions. Executed when HINT in is asserted by BNO08x. | |
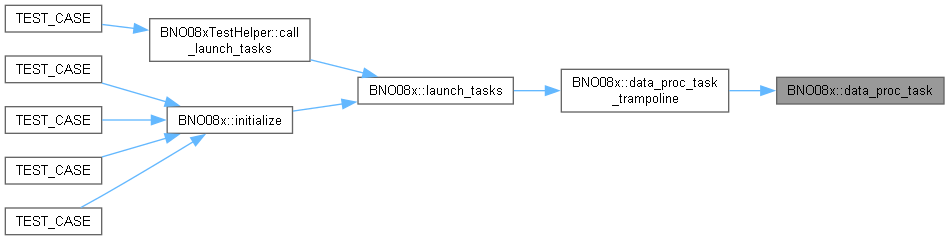
| void | data_proc_task () |
| Task responsible parsing packets. Executed when SPI task sends a packet to be parsed, notifies wait_for_data() call. | |
| esp_err_t | launch_tasks () |
| Launches spi_task and data_proc_task on constructor call. | |
| esp_err_t | kill_all_tasks () |
| Deletes spi_task and data_proc_task safely on deconstructor call. | |
| void | update_report_period_trackers (uint8_t report_ID, uint32_t new_period) |
| Updates period of respective report in report_period_trackers and recalculates host_int_timeout_ms according to next longest report period. | |
Static Private Member Functions | |
| static void | spi_task_trampoline (void *arg) |
| Static function used to launch spi task. | |
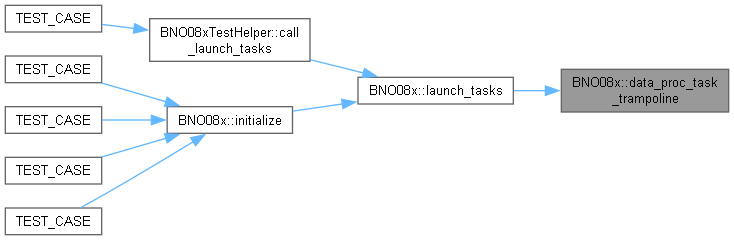
| static void | data_proc_task_trampoline (void *arg) |
| Static function used to launch data processing task. | |
| static uint8_t | report_ID_to_report_period_tracker_idx (uint8_t report_ID) |
| Converts report id to respective index in report_period_trackers. | |
| static void IRAM_ATTR | hint_handler (void *arg) |
| HINT interrupt service routine, handles falling edge of BNO08x HINT pin. | |
Private Attributes | |
| bool | first_boot = true |
| true only for first execution of hard_reset(), used to suppress the printing of product ID report. | |
| TaskHandle_t | spi_task_hdl |
| spi_task() handle | |
| TaskHandle_t | data_proc_task_hdl |
| data_proc_task() task handle | |
| SemaphoreHandle_t | sem_kill_tasks |
| semaphore to count amount of killed tasks | |
| EventGroupHandle_t | evt_grp_spi |
| Event group for indicating when bno08x hint pin has triggered and when new data has been processed. Used by calls to sending or receiving functions. | |
| EventGroupHandle_t | evt_grp_report_en |
| Event group for indicating which reports are currently enabled. | |
| EventGroupHandle_t | evt_grp_task_flow |
| Event group for indicating when tasks should complete and self-delete (on deconstructor call) | |
| QueueHandle_t | queue_rx_data |
| Packet queue used to send data received from bno08x from spi_task to data_proc_task. | |
| QueueHandle_t | queue_tx_data |
| Packet queue used to send data to be sent over SPI from sending functions to spi_task. | |
| QueueHandle_t | queue_frs_read_data |
| Queue used to send packet body from data_proc_task to frs read functions. | |
| QueueHandle_t | queue_reset_reason |
| Queue used to send reset reason from product id report to reset_reason() function. | |
| std::vector< std::function< void()> > | cb_list |
| uint32_t | meta_data [9] |
| First 9 bytes of meta data returned from FRS read operation (we don't really need the rest) (See Ref. Manual 5.1) | |
| bno08x_config_t | imu_config {} |
| IMU configuration settings. | |
| spi_bus_config_t | bus_config {} |
| SPI bus GPIO configuration settings. | |
| spi_device_interface_config_t | imu_spi_config {} |
| SPI slave device settings. | |
| spi_device_handle_t | spi_hdl {} |
| SPI device handle. | |
| spi_transaction_t | spi_transaction {} |
| SPI transaction handle. | |
| bno08x_init_status_t | init_status |
| Initialization status of various functionality, used by deconstructor during cleanup, set during initialization. | |
| uint32_t | time_stamp |
| Report timestamp (see datasheet 1.3.5.3) | |
| uint16_t | raw_accel_X |
| uint16_t | raw_accel_Y |
| uint16_t | raw_accel_Z |
| uint16_t | accel_accuracy |
| Raw acceleration readings (See SH-2 Ref. Manual 6.5.8) | |
| uint16_t | raw_lin_accel_X |
| uint16_t | raw_lin_accel_Y |
| uint16_t | raw_lin_accel_Z |
| uint16_t | accel_lin_accuracy |
| Raw linear acceleration (See SH-2 Ref. Manual 6.5.10) | |
| uint16_t | raw_calib_gyro_X |
| uint16_t | raw_calib_gyro_Y |
| uint16_t | raw_calib_gyro_Z |
| Raw gyro reading (See SH-2 Ref. Manual 6.5.13) | |
| uint16_t | raw_quat_I |
| uint16_t | raw_quat_J |
| uint16_t | raw_quat_K |
| uint16_t | raw_quat_real |
| uint16_t | raw_quat_radian_accuracy |
| uint16_t | quat_accuracy |
| Raw quaternion reading (See SH-2 Ref. Manual 6.5.44) | |
| uint16_t | integrated_gyro_velocity_X |
| uint16_t | integrated_gyro_velocity_Y |
| uint16_t | integrated_gyro_velocity_Z |
| Raw gyro angular velocity reading from integrated gyro rotation vector (See SH-2 Ref. Manual 6.5.44) | |
| uint16_t | gravity_X |
| uint16_t | gravity_Y |
| uint16_t | gravity_Z |
| uint16_t | gravity_accuracy |
| Gravity reading in m/s^2 (See SH-2 Ref. Manual 6.5.11) | |
| uint16_t | raw_uncalib_gyro_X |
| uint16_t | raw_uncalib_gyro_Y |
| uint16_t | raw_uncalib_gyro_Z |
| uint16_t | raw_bias_X |
| uint16_t | raw_bias_Y |
| uint16_t | raw_bias_Z |
| Uncalibrated gyro reading (See SH-2 Ref. Manual 6.5.14) | |
| uint16_t | raw_magf_X |
| uint16_t | raw_magf_Y |
| uint16_t | raw_magf_Z |
| uint16_t | magf_accuracy |
| Calibrated magnetic field reading in uTesla (See SH-2 Ref. Manual 6.5.16) | |
| uint8_t | tap_detector |
| Tap detector reading (See SH-2 Ref. Manual 6.5.27) | |
| uint16_t | step_count |
| Step counter reading (See SH-2 Ref. Manual 6.5.29) | |
| uint8_t | stability_classifier |
| BNO08xStability status reading (See SH-2 Ref. Manual 6.5.31) | |
| uint8_t | activity_classifier |
| BNO08xActivity status reading (See SH-2 Ref. Manual 6.5.36) | |
| uint8_t * | activity_confidences = nullptr |
| Confidence of read activities (See SH-2 Ref. Manual 6.5.36) | |
| uint8_t | calibration_status |
| Calibration status of device (See SH-2 Ref. Manual 6.4.7.1 & 6.4.7.2) | |
| uint16_t | mems_raw_accel_X |
| uint16_t | mems_raw_accel_Y |
| uint16_t | mems_raw_accel_Z |
| Raw accelerometer readings from MEMS sensor (See SH2 Ref. Manual 6.5.8) | |
| uint16_t | mems_raw_gyro_X |
| uint16_t | mems_raw_gyro_Y |
| uint16_t | mems_raw_gyro_Z |
| Raw gyro readings from MEMS sensor (See SH-2 Ref. Manual 6.5.12) | |
| uint16_t | mems_raw_magf_X |
| uint16_t | mems_raw_magf_Y |
| uint16_t | mems_raw_magf_Z |
| Raw magnetometer (compass) readings from MEMS sensor (See SH-2 Ref. Manual 6.5.15) | |
| bno08x_report_period_tracker_t | report_period_trackers [REPORT_CNT] |
| Current sample period of each report in microseconds linked to report ID (0 if not enabled). | |
| uint32_t | largest_sample_period_us |
| Current largest sample period of any enabled report in microseconds (used to determine timeout for hint ISR). | |
| uint8_t | current_slowest_report_ID |
| ID of the currently enabled report with the largest sample period. | |
| TickType_t | host_int_timeout_ms |
| Max wait between HINT being asserted by BNO08x before transaction is considered failed (in miliseconds), determined by enabled report with longest period. | |
Static Private Attributes | |
| static const constexpr uint8_t | TASK_CNT = 2U |
| Total amount of tasks utilized by BNO08x driver library. | |
| static const constexpr uint16_t | RX_DATA_LENGTH = 300U |
| length buffer containing data received over spi | |
| static const constexpr uint16_t | MAX_METADATA_LENGTH = 9U |
| max length of metadata used in frs read operations | |
| static const constexpr TickType_t | HOST_INT_TIMEOUT_DEFAULT_MS |
| Max wait between HINT being asserted by BNO08x before transaction is considered failed (in miliseconds), when no reports are enabled (ie during reset) | |
| static const constexpr TickType_t | HARD_RESET_DELAY_MS |
| How long RST pin is held low during hard reset (min 10ns according to datasheet, but should be longer for stable operation) | |
| static const constexpr TickType_t | CMD_EXECUTION_DELAY_MS |
| How long to delay after queueing command to allow it to execute (for ex. after sending command to enable report). | |
| static const constexpr uint32_t | SCLK_MAX_SPEED = 3000000UL |
| Max SPI SCLK speed BNO08x is capable of. | |
| static const constexpr EventBits_t | EVT_GRP_SPI_RX_DONE_BIT |
| When this bit is set it indicates a receive procedure has completed. | |
| static const constexpr EventBits_t | EVT_GRP_SPI_RX_VALID_PACKET_BIT |
| When this bit is set, it indicates a valid packet has been received and processed. | |
| static const constexpr EventBits_t | EVT_GRP_SPI_RX_INVALID_PACKET_BIT |
| When this bit is set, it indicates an invalid packet has been received. | |
| static const constexpr EventBits_t | EVT_GRP_SPI_TX_DONE_BIT = (1 << 3) |
| When this bit is set, it indicates a queued packet has been sent. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_ROTATION_VECTOR_BIT = (1 << 0) |
| When set, rotation vector reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_GAME_ROTATION_VECTOR_BIT = (1 << 1) |
| When set, game rotation vector reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_ARVR_S_ROTATION_VECTOR_BIT |
| When set, ARVR stabilized rotation vector reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_ARVR_S_GAME_ROTATION_VECTOR_BIT |
| When set, ARVR stabilized game rotation vector reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_GYRO_ROTATION_VECTOR_BIT |
| When set, gyro integrator rotation vector reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_ACCELEROMETER_BIT = (1U << 5U) |
| When set, accelerometer reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_LINEAR_ACCELEROMETER_BIT = (1U << 6U) |
| When set, linear accelerometer reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_GRAVITY_BIT = (1U << 7U) |
| When set, gravity reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_GYRO_BIT = (1U << 8U) |
| When set, gyro reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_GYRO_UNCALIBRATED_BIT = (1U << 9U) |
| When set, uncalibrated gyro reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_MAGNETOMETER_BIT = (1U << 10U) |
| When set, magnetometer reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_TAP_DETECTOR_BIT = (1U << 11U) |
| When set, tap detector reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_STEP_COUNTER_BIT = (1U << 12U) |
| When set, step counter reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_STABILITY_CLASSIFIER_BIT = (1U << 13U) |
| When set, stability classifier reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_ACTIVITY_CLASSIFIER_BIT = (1U << 14U) |
| When set, activity classifier reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_RAW_ACCELEROMETER_BIT = (1U << 15U) |
| When set, raw accelerometer reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_RAW_GYRO_BIT = (1U << 16U) |
| When set, raw gyro reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_RAW_MAGNETOMETER_BIT = (1U << 17U) |
| When set, raw magnetometer reports are active. | |
| static const constexpr EventBits_t | EVT_GRP_TSK_FLW_RUNNING_BIT |
| When set, data_proc_task and spi_task are active, when 0 they are pending deletion or deleted. | |
| static const constexpr EventBits_t | EVT_GRP_RPT_ALL_BITS |
| static const constexpr uint8_t | CALIBRATE_ACCEL = 0U |
| Calibrate accelerometer command used by queue_calibrate_command. | |
| static const constexpr uint8_t | CALIBRATE_GYRO = 1U |
| Calibrate gyro command used by queue_calibrate_command. | |
| static const constexpr uint8_t | CALIBRATE_MAG = 2U |
| Calibrate magnetometer command used by queue_calibrate_command. | |
| static const constexpr uint8_t | CALIBRATE_PLANAR_ACCEL = 3U |
| Calibrate planar acceleration command used by queue_calibrate_command. | |
| static const constexpr uint8_t | CALIBRATE_ACCEL_GYRO_MAG |
| Calibrate accelerometer, gyro, & magnetometer command used by queue_calibrate_command. | |
| static const constexpr uint8_t | CALIBRATE_STOP = 5U |
| Stop calibration command used by queue_calibrate_command. | |
| static const constexpr uint8_t | COMMAND_ERRORS = 1U |
| static const constexpr uint8_t | COMMAND_COUNTER = 2U |
| static const constexpr uint8_t | COMMAND_TARE = 3U |
| Command and response to tare command (See Sh2 Ref. Manual 6.4.4) | |
| static const constexpr uint8_t | COMMAND_INITIALIZE = 4U |
| Reinitialize sensor hub components See (SH2 Ref. Manual 6.4.5) | |
| static const constexpr uint8_t | COMMAND_DCD = 6U |
| Save DCD command (See SH2 Ref. Manual 6.4.7) | |
| static const constexpr uint8_t | COMMAND_ME_CALIBRATE = 7U |
| Command and response to configure ME calibration (See SH2 Ref. Manual 6.4.7) | |
| static const constexpr uint8_t | COMMAND_DCD_PERIOD_SAVE = 9U |
| Configure DCD periodic saving (See SH2 Ref. Manual 6.4) | |
| static const constexpr uint8_t | COMMAND_OSCILLATOR = 10U |
| Retrieve oscillator type command (See SH2 Ref. Manual 6.4) | |
| static const constexpr uint8_t | COMMAND_CLEAR_DCD = 11U |
| Clear DCD & Reset command (See SH2 Ref. Manual 6.4) | |
| static const constexpr uint8_t | SHTP_REPORT_COMMAND_RESPONSE = 0xF1U |
| See SH2 Ref. Manual 6.3.9. | |
| static const constexpr uint8_t | SHTP_REPORT_COMMAND_REQUEST = 0xF2U |
| See SH2 Ref. Manual 6.3.8. | |
| static const constexpr uint8_t | SHTP_REPORT_FRS_READ_RESPONSE = 0xF3U |
| See SH2 Ref. Manual 6.3.7. | |
| static const constexpr uint8_t | SHTP_REPORT_FRS_READ_REQUEST = 0xF4U |
| See SH2 Ref. Manual 6.3.6. | |
| static const constexpr uint8_t | SHTP_REPORT_PRODUCT_ID_RESPONSE = 0xF8U |
| See SH2 Ref. Manual 6.3.2. | |
| static const constexpr uint8_t | SHTP_REPORT_PRODUCT_ID_REQUEST = 0xF9U |
| See SH2 Ref. Manual 6.3.1. | |
| static const constexpr uint8_t | SHTP_REPORT_BASE_TIMESTAMP = 0xFBU |
| See SH2 Ref. Manual 7.2.1. | |
| static const constexpr uint8_t | SHTP_REPORT_SET_FEATURE_COMMAND = 0xFDU |
| See SH2 Ref. Manual 6.5.4. | |
| static const constexpr uint8_t | SHTP_REPORT_GET_FEATURE_RESPONSE = 0xFCU |
| See SH2 Ref. Manual 6.5.5. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_ACCELEROMETER = 0x01U |
| See SH2 Ref. Manual 6.5.9. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_GYROSCOPE = 0x02U |
| See SH2 Ref. Manual 6.5.13. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_MAGNETIC_FIELD = 0x03U |
| See SH2 Ref. Manual 6.5.16. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_LINEAR_ACCELERATION = 0x04U |
| See SH2 Ref. Manual 6.5.10. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_ROTATION_VECTOR = 0x05U |
| See SH2 Ref. Manual 6.5.18. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_GRAVITY = 0x06U |
| See SH2 Ref. Manual 6.5.11. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_UNCALIBRATED_GYRO = 0x07U |
| See SH2 Ref. Manual 6.5.14. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_GAME_ROTATION_VECTOR = 0x08U |
| See SH2 Ref. Manual 6.5.19. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_GEOMAGNETIC_ROTATION_VECTOR = 0x09U |
| See SH2 Ref. Manual 6.5.20. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_GYRO_INTEGRATED_ROTATION_VECTOR = 0x2AU |
| See SH2 Ref. Manual 6.5.44. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_TAP_DETECTOR = 0x10U |
| See SH2 Ref. Manual 6.5.27. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_STEP_COUNTER = 0x11U |
| See SH2 Ref. Manual 6.5.29. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_STABILITY_CLASSIFIER = 0x13U |
| See SH2 Ref. Manual 6.5.31. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_RAW_ACCELEROMETER = 0x14U |
| See SH2 Ref. Manual 6.5.8. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_RAW_GYROSCOPE = 0x15U |
| See SH2 Ref. Manual 6.5.12. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_RAW_MAGNETOMETER = 0x16U |
| See SH2 Ref. Manual 6.5.15. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_PERSONAL_ACTIVITY_CLASSIFIER = 0x1EU |
| See SH2 Ref. Manual 6.5.36. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_ARVR_STABILIZED_ROTATION_VECTOR = 0x28U |
| See SH2 Ref. Manual 6.5.42. | |
| static const constexpr uint8_t | SENSOR_REPORT_ID_ARVR_STABILIZED_GAME_ROTATION_VECTOR = 0x29U |
| See SH2 Ref. Manual 6.5.43. | |
| static const constexpr uint8_t | TARE_NOW = 0U |
| See SH2 Ref. Manual 6.4.4.1. | |
| static const constexpr uint8_t | TARE_PERSIST = 1U |
| See SH2 Ref. Manual 6.4.4.2. | |
| static const constexpr uint8_t | TARE_SET_REORIENTATION = 2U |
| See SH2 Ref. Manual 6.4.4.3. | |
| static const constexpr uint8_t | REPORT_CNT = 19 |
| Total unique reports that can be returned by BNO08x. | |
| static const constexpr char * | TAG = "BNO08x" |
| Class tag used for serial print statements. | |
Friends | |
| class | BNO08xTestHelper |
Detailed Description
BNO08x IMU driver class.
Member Typedef Documentation
◆ bno08x_init_status_t
|
private |
Holds info about which functionality has been successfully initialized (used by deconstructor during cleanup).
◆ bno08x_report_period_tracker_t
|
private |
◆ bno08x_rx_packet_t
|
private |
Holds data that is received over spi.
◆ bno08x_tx_packet_t
|
private |
Holds data that is sent over spi.
Member Enumeration Documentation
◆ channels_t
|
private |
Constructor & Destructor Documentation
◆ BNO08x()
| BNO08x::BNO08x | ( | bno08x_config_t | imu_config = bno08x_config_t() | ) |
BNO08x imu constructor.
Construct a BNO08x object for managing a BNO08x sensor.
- Parameters
-
imu_config Configuration settings (optional), default settings can be seen in bno08x_config_t
- Returns
- void, nothing to return
◆ ~BNO08x()
| BNO08x::~BNO08x | ( | ) |
Member Function Documentation
◆ calibrate_accelerometer()
| void BNO08x::calibrate_accelerometer | ( | ) |
Sends command to calibrate accelerometer.
- Returns
- void, nothing to return

◆ calibrate_all()
| void BNO08x::calibrate_all | ( | ) |
Sends command to calibrate accelerometer, gyro, and magnetometer.
- Returns
- void, nothing to return


◆ calibrate_gyro()
| void BNO08x::calibrate_gyro | ( | ) |
Sends command to calibrate gyro.
- Returns
- void, nothing to return

◆ calibrate_magnetometer()
| void BNO08x::calibrate_magnetometer | ( | ) |
Sends command to calibrate magnetometer.
- Returns
- void, nothing to return

◆ calibrate_planar_accelerometer()
| void BNO08x::calibrate_planar_accelerometer | ( | ) |
Sends command to calibrate planar accelerometer.
- Returns
- void, nothing to return

◆ calibration_complete()
| bool BNO08x::calibration_complete | ( | ) |
Returns true if calibration has completed.
- Returns
- True if calibration complete, false if otherwise.

◆ clear_tare()
| void BNO08x::clear_tare | ( | ) |
Sends command to clear persistent tare settings in non-volatile memory of BNO08x (See Ref. Manual 6.4.4.3)
- Returns
- void, nothing to return

◆ data_available()
| bool BNO08x::data_available | ( | bool | ignore_no_reports_enabled = false | ) |
Checks if BNO08x has asserted interrupt and sent data.
- Parameters
-
ignore_no_reports_enabled Forces a wait for data even if no reports are enabled (default is false), used for unit tests.
- Returns
- True if new data has been parsed and saved, false if otherwise.

◆ data_proc_task()
|
private |
Task responsible parsing packets. Executed when SPI task sends a packet to be parsed, notifies wait_for_data() call.
- Returns
- void, nothing to return
◆ data_proc_task_trampoline()
|
staticprivate |
Static function used to launch data processing task.
Used such that data_proc_task() can be non-static class member.
- Parameters
-
arg void pointer to BNO08x imu object
- Returns
- void, nothing to return
◆ deinit_gpio()
|
private |
Deinitializes GPIO, called from deconstructor.
- Returns
- ESP_OK if deinitialization was success.

◆ deinit_gpio_inputs()
|
private |
Deinitializes GPIO inputs, called from deconstructor.
- Returns
- ESP_OK if deinitialization was success.

◆ deinit_gpio_outputs()
|
private |
Deinitializes GPIO outputs, called from deconstructor.
- Returns
- ESP_OK if deinitialization was success.

◆ deinit_hint_isr()
|
private |
Deinitializes host interrupt ISR, called from deconstructor.
- Returns
- ESP_OK if deinitialization was success.

◆ deinit_spi()
|
private |
Deinitializes SPI.
- Returns
- ESP_OK if deinitialization was success.

◆ disable_accelerometer()
| void BNO08x::disable_accelerometer | ( | ) |
Sends command to disable accelerometer reports by setting report interval to 0.
- Returns
- void, nothing to return

◆ disable_activity_classifier()
| void BNO08x::disable_activity_classifier | ( | ) |
Sends command to disable activity classifier reports by setting report interval to 0.
- Returns
- void, nothing to return

◆ disable_ARVR_stabilized_game_rotation_vector()
| void BNO08x::disable_ARVR_stabilized_game_rotation_vector | ( | ) |
Sends command to disable ARVR stabilized game rotation vector reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_ARVR_stabilized_rotation_vector()
| void BNO08x::disable_ARVR_stabilized_rotation_vector | ( | ) |
Sends command to disable ARVR stabilized rotation vector reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_calibrated_gyro()
| void BNO08x::disable_calibrated_gyro | ( | ) |
Sends command to disable calibrated gyro reports by setting report interval to 0.
- Returns
- void, nothing to return


◆ disable_game_rotation_vector()
| void BNO08x::disable_game_rotation_vector | ( | ) |
Sends command to disable game rotation vector reports by setting report interval to 0.
- Returns
- void, nothing to return

◆ disable_gravity()
| void BNO08x::disable_gravity | ( | ) |
Sends command to disable gravity reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_gyro_integrated_rotation_vector()
| void BNO08x::disable_gyro_integrated_rotation_vector | ( | ) |
Sends command to disable gyro integrated rotation vector reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_linear_accelerometer()
| void BNO08x::disable_linear_accelerometer | ( | ) |
Sends command to disable linear accelerometer reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_magnetometer()
| void BNO08x::disable_magnetometer | ( | ) |
Sends command to disable magnetometer reports by setting report interval to 0.
- Returns
- void, nothing to return

◆ disable_raw_mems_accelerometer()
| void BNO08x::disable_raw_mems_accelerometer | ( | ) |
Sends command to disable raw accelerometer reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_raw_mems_gyro()
| void BNO08x::disable_raw_mems_gyro | ( | ) |
Sends command to disable raw gyro reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_raw_mems_magnetometer()
| void BNO08x::disable_raw_mems_magnetometer | ( | ) |
Sends command to disable raw magnetometer reports by setting report interval to 0.
- Returns
- void, nothing to return
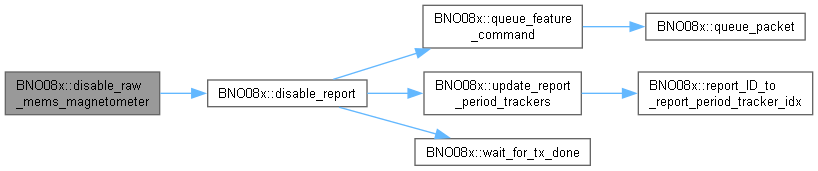
◆ disable_report()
|
private |
Disables a sensor report for a given ID by setting its time interval to 0.
- Parameters
-
report_ID The report ID of the sensor, i.e. SENSOR_REPORT_ID_X report_evt_grp_bit The event group bit for the respective report, to indicate to spi_task() it's disabled, i.e. EVT_GRP_RPT_X
If no reports are enabled after disabling, this function will disable interrupts on hint pin.
- Returns
- void, nothing to return
◆ disable_rotation_vector()
| void BNO08x::disable_rotation_vector | ( | ) |
Sends command to disable rotation vector reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_stability_classifier()
| void BNO08x::disable_stability_classifier | ( | ) |
Sends command to disable stability reports by setting report interval to 0.
- Returns
- void, nothing to return

◆ disable_step_counter()
| void BNO08x::disable_step_counter | ( | ) |
Sends command to disable step counter reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_tap_detector()
| void BNO08x::disable_tap_detector | ( | ) |
Sends command to disable tap detector reports by setting report interval to 0.
- Returns
- void, nothing to return
◆ disable_uncalibrated_gyro()
| void BNO08x::disable_uncalibrated_gyro | ( | ) |
Sends command to disable uncalibrated gyro reports by setting report interval to 0.
- Returns
- void, nothing to return

◆ enable_accelerometer()
| void BNO08x::enable_accelerometer | ( | uint32_t | time_between_reports | ) |
Sends command to enable accelerometer reports (See Ref. Manual 6.5.9)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_activity_classifier()
| void BNO08x::enable_activity_classifier | ( | uint32_t | time_between_reports, |
| BNO08xActivityEnable | activities_to_enable, | ||
| uint8_t(&) | activity_confidence_vals[9] ) |
Sends command to enable activity classifier reports (See Ref. Manual 6.5.36)
- Parameters
-
time_between_reports Desired time between reports in microseconds. activities_to_enable Desired activities to enable (0x1F enables all). activity_confidence_vals Returned activity level confidences.
- Returns
- void, nothing to return

◆ enable_ARVR_stabilized_game_rotation_vector()
| void BNO08x::enable_ARVR_stabilized_game_rotation_vector | ( | uint32_t | time_between_reports | ) |
Sends command to enable ARVR stabilized game rotation vector reports (See Ref. Manual 6.5.43)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_ARVR_stabilized_rotation_vector()
| void BNO08x::enable_ARVR_stabilized_rotation_vector | ( | uint32_t | time_between_reports | ) |
Sends command to enable ARVR stabilized rotation vector reports (See Ref. Manual 6.5.42)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_calibrated_gyro()
| void BNO08x::enable_calibrated_gyro | ( | uint32_t | time_between_reports | ) |
Sends command to enable calibrated gyro reports (See Ref. Manual 6.5.13)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return

◆ enable_game_rotation_vector()
| void BNO08x::enable_game_rotation_vector | ( | uint32_t | time_between_reports | ) |
Sends command to enable game rotation vector reports (See Ref. Manual 6.5.19)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_gravity()
| void BNO08x::enable_gravity | ( | uint32_t | time_between_reports | ) |
Sends command to enable gravity reading reports (See Ref. Manual 6.5.11)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_gyro_integrated_rotation_vector()
| void BNO08x::enable_gyro_integrated_rotation_vector | ( | uint32_t | time_between_reports | ) |
Sends command to enable gyro integrated rotation vector reports (See Ref. Manual 6.5.44)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_linear_accelerometer()
| void BNO08x::enable_linear_accelerometer | ( | uint32_t | time_between_reports | ) |
Sends command to enable linear accelerometer reports (See Ref. Manual 6.5.10)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_magnetometer()
| void BNO08x::enable_magnetometer | ( | uint32_t | time_between_reports | ) |
Sends command to enable magnetometer reports (See Ref. Manual 6.5.16)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_raw_mems_accelerometer()
| void BNO08x::enable_raw_mems_accelerometer | ( | uint32_t | time_between_reports | ) |
Sends command to enable raw MEMs accelerometer reports (See Ref. Manual 6.5.8)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_raw_mems_gyro()
| void BNO08x::enable_raw_mems_gyro | ( | uint32_t | time_between_reports | ) |
Sends command to enable raw MEMs gyro reports (See Ref. Manual 6.5.12)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_raw_mems_magnetometer()
| void BNO08x::enable_raw_mems_magnetometer | ( | uint32_t | time_between_reports | ) |
Sends command to enable raw MEMs magnetometer reports (See Ref. Manual 6.5.15)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
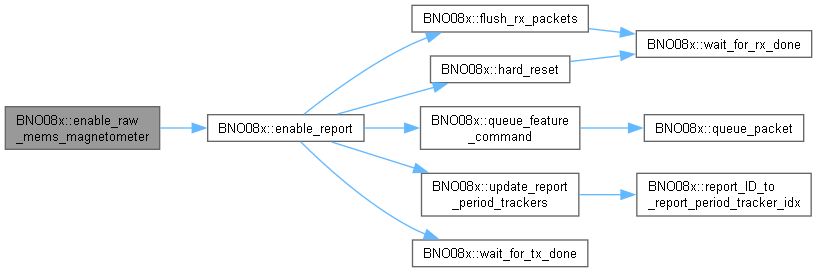
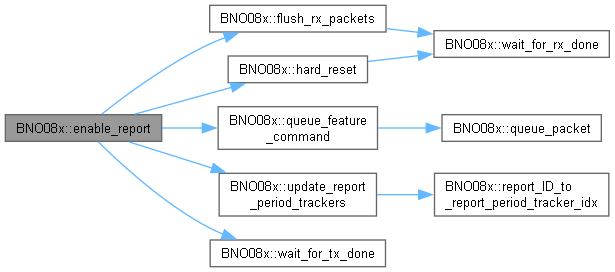
◆ enable_report()
|
private |
Enables a sensor report for a given ID.
- Parameters
-
report_ID The report ID of the sensor, i.e. SENSOR_REPORT_ID_X time_between_reports The desired time in microseconds between each report. The BNO08x will send reports according to this interval. report_evt_grp_bit The event group bit for the respective report, to indicate to spi_task() it's enabled, i.e. EVT_GRP_RPT_X
If no reports were enabled prior to call, this function will re-enable interrupts on hint pin.
- Returns
- void, nothing to return
◆ enable_rotation_vector()
| void BNO08x::enable_rotation_vector | ( | uint32_t | time_between_reports | ) |
Sends command to enable rotation vector reports (See Ref. Manual 6.5.18)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ enable_stability_classifier()
| void BNO08x::enable_stability_classifier | ( | uint32_t | time_between_reports | ) |
Sends command to enable activity stability classifier reports (See Ref. Manual 6.5.31)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return

◆ enable_step_counter()
| void BNO08x::enable_step_counter | ( | uint32_t | time_between_reports | ) |
Sends command to enable step counter reports (See Ref. Manual 6.5.29)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
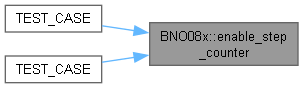
◆ enable_tap_detector()
| void BNO08x::enable_tap_detector | ( | uint32_t | time_between_reports | ) |
Sends command to enable tap detector reports (See Ref. Manual 6.5.27)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
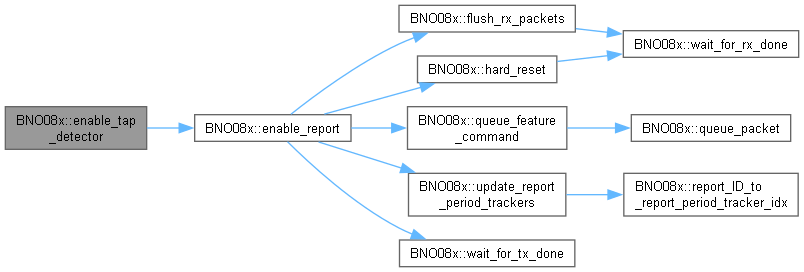
◆ enable_uncalibrated_gyro()
| void BNO08x::enable_uncalibrated_gyro | ( | uint32_t | time_between_reports | ) |
Sends command to enable uncalibrated gyro reports (See Ref. Manual 6.5.14)
- Parameters
-
time_between_reports Desired time between reports in microseconds.
- Returns
- void, nothing to return
◆ end_calibration()
| void BNO08x::end_calibration | ( | ) |
Sends command to end calibration procedure.
- Returns
- void, nothing to return

◆ flush_rx_packets()
|
private |

◆ FRS_read_data()
| bool BNO08x::FRS_read_data | ( | uint16_t | record_ID, |
| uint8_t | start_location, | ||
| uint8_t | words_to_read ) |
Read meta data from BNO08x FRS (flash record system) given the record ID. Contains Q points and other info. (See Ref. Manual 5.1 & 6.3.7)
Note that Q points from the data sheet can be used as well, using the ones stored in flash is optional.
- Parameters
-
record_ID Which record ID/ sensor to request meta data from. start_location Start byte location. words_to_read Length of words to read.
- Returns
- True if meta data read successfully.

◆ FRS_read_request()
| bool BNO08x::FRS_read_request | ( | uint16_t | record_ID, |
| uint16_t | read_offset, | ||
| uint16_t | block_size ) |
Requests meta data from BNO08x FRS (flash record system) given the record ID. Contains Q points and other info. (See Ref. Manual 5.1 & 6.3.6)
Note that Q points from the data sheet can be used as well, using the ones stored in flash is optional.
- Parameters
-
record_ID Which record ID/ sensor to request meta data from. start_location Start byte location. words_to_read Length of words to read.
- Returns
- True if read request acknowledged (HINT was asserted)
◆ FRS_read_word()
| uint32_t BNO08x::FRS_read_word | ( | uint16_t | record_ID, |
| uint8_t | word_number ) |
Reads meta data word from BNO08x FRS (flash record system) given the record ID and word number. (See Ref. Manual 5.1 & 6.3.7)
Note that Q points from the data sheet can be used as well, using the ones stored in flash is optional.
- Parameters
-
record_ID Which record ID/ sensor to request meta data from. word_number Desired word to read.
- Returns
- Requested meta data word, 0 if failed.

◆ get_accel()
| void BNO08x::get_accel | ( | float & | x, |
| float & | y, | ||
| float & | z, | ||
| BNO08xAccuracy & | accuracy ) |
Get full acceleration (total acceleration of device, units in m/s^2).
- Parameters
-
x Reference variable to save X axis acceleration. y Reference variable to save Y axis acceleration. z Reference variable to save Z axis acceleration. accuracy Reference variable to save reported acceleration accuracy.
- Returns
- void, nothing to return

◆ get_accel_accuracy()
| BNO08xAccuracy BNO08x::get_accel_accuracy | ( | ) |
Get accuracy of linear acceleration.
- Returns
- Accuracy of linear acceleration.
◆ get_accel_X()
| float BNO08x::get_accel_X | ( | ) |
Get x axis acceleration (total acceleration of device, units in m/s^2).
- Returns
- The angular reported x axis acceleration.

◆ get_accel_Y()
| float BNO08x::get_accel_Y | ( | ) |
Get y axis acceleration (total acceleration of device, units in m/s^2).
- Returns
- The angular reported y axis acceleration.

◆ get_accel_Z()
| float BNO08x::get_accel_Z | ( | ) |
Get z axis acceleration (total acceleration of device, units in m/s^2).
- Returns
- The angular reported z axis acceleration.

◆ get_activity_classifier()
| BNO08xActivity BNO08x::get_activity_classifier | ( | ) |
Get the current activity classifier (Seee Ref. Manual 6.5.36)
- Returns
- The current activity: 0 = unknown 1 = in vehicle 2 = on bicycle 3 = on foot 4 = still 5 = tilting 6 = walking 7 = runnning 8 = on stairs
◆ get_calibrated_gyro_velocity()
| void BNO08x::get_calibrated_gyro_velocity | ( | float & | x, |
| float & | y, | ||
| float & | z ) |
Get full rotational velocity with drift compensation (units in Rad/s).
- Parameters
-
x Reference variable to save X axis angular velocity y Reference variable to save Y axis angular velocity z Reference variable to save Z axis angular velocity
- Returns
- void, nothing to return

◆ get_calibrated_gyro_velocity_X()
| float BNO08x::get_calibrated_gyro_velocity_X | ( | ) |
Get calibrated gyro x axis angular velocity measurement.
- Returns
- The angular reported x axis angular velocity from calibrated gyro (drift compensation applied).

◆ get_calibrated_gyro_velocity_Y()
| float BNO08x::get_calibrated_gyro_velocity_Y | ( | ) |
Get calibrated gyro y axis angular velocity measurement.
- Returns
- The angular reported y axis angular velocity from calibrated gyro (drift compensation applied).

◆ get_calibrated_gyro_velocity_Z()
| float BNO08x::get_calibrated_gyro_velocity_Z | ( | ) |
Get calibrated gyro z axis angular velocity measurement.
- Returns
- The angular reported z axis angular velocity from calibrated gyro (drift compensation applied).

◆ get_gravity()
| void BNO08x::get_gravity | ( | float & | x, |
| float & | y, | ||
| float & | z, | ||
| BNO08xAccuracy & | accuracy ) |
Get full reported gravity vector, units in m/s^2.
- Parameters
-
x Reference variable to save X axis gravity. y Reference variable to save Y axis axis gravity. z Reference variable to save Z axis axis gravity. accuracy Reference variable to save reported gravity accuracy.
- Returns
- void, nothing to return

◆ get_gravity_accuracy()
| BNO08xAccuracy BNO08x::get_gravity_accuracy | ( | ) |
Get the reported gravity accuracy.
- Returns
- Accuracy of reported gravity.
◆ get_gravity_X()
| float BNO08x::get_gravity_X | ( | ) |
Get the reported x axis gravity.
- Returns
- x axis gravity in m/s^2

◆ get_gravity_Y()
| float BNO08x::get_gravity_Y | ( | ) |
Get the reported y axis gravity.
- Returns
- y axis gravity in m/s^2

◆ get_gravity_Z()
| float BNO08x::get_gravity_Z | ( | ) |
Get the reported z axis gravity.
- Returns
- z axis gravity in m/s^2

◆ get_integrated_gyro_velocity()
| void BNO08x::get_integrated_gyro_velocity | ( | float & | x, |
| float & | y, | ||
| float & | z ) |
Full rotational velocity from gyro-integrated rotation vector (See Ref. Manual 6.5.44)
- Parameters
-
x Reference variable to save X axis angular velocity y Reference variable to save Y axis angular velocity z Reference variable to save Z axis angular velocity
- Returns
- void, nothing to return

◆ get_integrated_gyro_velocity_X()
| float BNO08x::get_integrated_gyro_velocity_X | ( | ) |
Get x axis angular velocity from gyro-integrated rotation vector. (See Ref. Manual 6.5.44)
- Returns
- The reported x axis angular velocity.

◆ get_integrated_gyro_velocity_Y()
| float BNO08x::get_integrated_gyro_velocity_Y | ( | ) |
Get y axis angular velocity from gyro-integrated rotation vector. (See Ref. Manual 6.5.44)
- Returns
- The reported y axis angular velocity.

◆ get_integrated_gyro_velocity_Z()
| float BNO08x::get_integrated_gyro_velocity_Z | ( | ) |
Get z axis angular velocity from gyro-integrated rotation vector. (See Ref. Manual 6.5.44)
- Returns
- The reported Z axis angular velocity.

◆ get_linear_accel()
| void BNO08x::get_linear_accel | ( | float & | x, |
| float & | y, | ||
| float & | z, | ||
| BNO08xAccuracy & | accuracy ) |
Get full linear acceleration (acceleration of the device minus gravity, units in m/s^2).
- Parameters
-
x Reference variable to save X axis acceleration. y Reference variable to save Y axis acceleration. z Reference variable to save Z axis acceleration. accuracy Reference variable to save reported linear acceleration accuracy.
- Returns
- void, nothing to return

◆ get_linear_accel_accuracy()
| BNO08xAccuracy BNO08x::get_linear_accel_accuracy | ( | ) |
Get accuracy of linear acceleration.
- Returns
- Accuracy of linear acceleration.
◆ get_linear_accel_X()
| float BNO08x::get_linear_accel_X | ( | ) |
Get x axis linear acceleration (acceleration of device minus gravity, units in m/s^2)
- Returns
- The angular reported x axis linear acceleration.

◆ get_linear_accel_Y()
| float BNO08x::get_linear_accel_Y | ( | ) |
Get y axis linear acceleration (acceleration of device minus gravity, units in m/s^2)
- Returns
- The angular reported y axis linear acceleration.

◆ get_linear_accel_Z()
| float BNO08x::get_linear_accel_Z | ( | ) |
Get z axis linear acceleration (acceleration of device minus gravity, units in m/s^2)
- Returns
- The angular reported z axis linear acceleration.

◆ get_magf()
| void BNO08x::get_magf | ( | float & | x, |
| float & | y, | ||
| float & | z, | ||
| BNO08xAccuracy & | accuracy ) |
Get the full magnetic field vector.
- Parameters
-
x Reference variable to save reported x magnitude. y Reference variable to save reported y magnitude. x Reference variable to save reported z magnitude. accuracy Reference variable to save reported accuracy.
- Returns
- void, nothing to return

◆ get_magf_accuracy()
| BNO08xAccuracy BNO08x::get_magf_accuracy | ( | ) |
Get accuracy of reported magnetic field vector.
- Returns
- The accuracy of reported magnetic field vector.

◆ get_magf_X()
| float BNO08x::get_magf_X | ( | ) |
Get X component of magnetic field vector.
- Returns
- The reported X component of magnetic field vector.


◆ get_magf_Y()
| float BNO08x::get_magf_Y | ( | ) |
Get Y component of magnetic field vector.
- Returns
- The reported Y component of magnetic field vector.


◆ get_magf_Z()
| float BNO08x::get_magf_Z | ( | ) |
Get Z component of magnetic field vector.
- Returns
- The reported Z component of magnetic field vector.


◆ get_pitch()
| float BNO08x::get_pitch | ( | ) |
Get the reported rotation about y axis.
- Returns
- Rotation about the y axis in radians.

◆ get_pitch_deg()
| float BNO08x::get_pitch_deg | ( | ) |
Get the reported rotation about y axis.
- Returns
- Rotation about the y axis in degrees.
◆ get_Q1()
| int16_t BNO08x::get_Q1 | ( | uint16_t | record_ID | ) |
Gets Q1 point from BNO08x FRS (flash record system).
Note that Q points from the data sheet can be used as well, using the ones stored in flash is optional.
- Parameters
-
record_ID Which record ID/ sensor to get Q1 value for.
- Returns
- Q1 value for requested sensor.

◆ get_Q2()
| int16_t BNO08x::get_Q2 | ( | uint16_t | record_ID | ) |
Gets Q2 point from BNO08x FRS (flash record system).
Note that Q points from the data sheet can be used as well, using the ones stored in flash is optional.
- Parameters
-
record_ID Which record ID/ sensor to get Q2 value for.
- Returns
- Q2 value for requested sensor.

◆ get_Q3()
| int16_t BNO08x::get_Q3 | ( | uint16_t | record_ID | ) |
Gets Q3 point from BNO08x FRS (flash record system).
Note that Q points from the data sheet can be used as well, using the ones stored in flash is optional.
- Parameters
-
record_ID Which record ID/ sensor to get Q3 value for.
- Returns
- Q3 value for requested sensor.

◆ get_quat()
| void BNO08x::get_quat | ( | float & | i, |
| float & | j, | ||
| float & | k, | ||
| float & | real, | ||
| float & | rad_accuracy, | ||
| BNO08xAccuracy & | accuracy ) |
Get the full quaternion reading.
- Parameters
-
i Reference variable to save reported i component of quaternion. j Reference variable to save reported j component of quaternion. k Reference variable to save reported k component of quaternion. real Reference variable to save reported real component of quaternion. rad_accuracy Reference variable to save reported raw quaternion radian accuracy. accuracy Reference variable to save reported quaternion accuracy.
- Returns
- void, nothing to return

◆ get_quat_accuracy()
| BNO08xAccuracy BNO08x::get_quat_accuracy | ( | ) |
Get accuracy of reported quaternion.
- Returns
- The accuracy of reported quaternion.

◆ get_quat_I()
| float BNO08x::get_quat_I | ( | ) |
Get I component of reported quaternion.
- Returns
- The I component of reported quaternion.

◆ get_quat_J()
| float BNO08x::get_quat_J | ( | ) |
Get J component of reported quaternion.
- Returns
- The J component of reported quaternion.

◆ get_quat_K()
| float BNO08x::get_quat_K | ( | ) |
Get K component of reported quaternion.
- Returns
- The K component of reported quaternion.

◆ get_quat_radian_accuracy()
| float BNO08x::get_quat_radian_accuracy | ( | ) |
Get radian accuracy of reported quaternion.
- Returns
- The radian accuracy of reported quaternion.

◆ get_quat_real()
| float BNO08x::get_quat_real | ( | ) |
Get real component of reported quaternion.
- Returns
- The real component of reported quaternion.

◆ get_range()
| float BNO08x::get_range | ( | uint16_t | record_ID | ) |
Gets range from BNO08x FRS (flash record system).
- Parameters
-
record_ID Which record ID/ sensor to get range value for.
- Returns
- The range value for the requested sensor.

◆ get_raw_mems_accel()
| void BNO08x::get_raw_mems_accel | ( | uint16_t & | x, |
| uint16_t & | y, | ||
| uint16_t & | z ) |
Get full raw acceleration from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8).
- Parameters
-
x Reference variable to save raw X axis acceleration. y Reference variable to save raw Y axis acceleration. z Reference variable to save raw Z axis acceleration.
- Returns
- void, nothing to return
◆ get_raw_mems_accel_X()
| uint16_t BNO08x::get_raw_mems_accel_X | ( | ) |
Get raw accelerometer x axis reading from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8)
- Returns
- Reported raw accelerometer x axis reading from physical MEMs sensor.
◆ get_raw_mems_accel_Y()
| uint16_t BNO08x::get_raw_mems_accel_Y | ( | ) |
Get raw accelerometer y axis reading from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8)
- Returns
- Reported raw accelerometer y axis reading from physical MEMs sensor.
◆ get_raw_mems_accel_Z()
| uint16_t BNO08x::get_raw_mems_accel_Z | ( | ) |
Get raw accelerometer z axis reading from physical accelerometer MEMs sensor (See Ref. Manual 6.5.8)
- Returns
- Reported raw accelerometer z axis reading from physical MEMs sensor.
◆ get_raw_mems_gyro()
| void BNO08x::get_raw_mems_gyro | ( | uint16_t & | x, |
| uint16_t & | y, | ||
| uint16_t & | z ) |
Get raw gyroscope full reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12)
- Parameters
-
x Reference variable to save raw X axis data. y Reference variable to save raw Y axis data. z Reference variable to save raw Z axis data.
- Returns
- void, nothing to return
◆ get_raw_mems_gyro_X()
| uint16_t BNO08x::get_raw_mems_gyro_X | ( | ) |
Get raw gyroscope x axis reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12)
- Returns
- Reported raw gyroscope x axis reading from physical MEMs sensor.
◆ get_raw_mems_gyro_Y()
| uint16_t BNO08x::get_raw_mems_gyro_Y | ( | ) |
Get raw gyroscope y axis reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12)
- Returns
- Reported raw gyroscope y axis reading from physical MEMs sensor.
◆ get_raw_mems_gyro_Z()
| uint16_t BNO08x::get_raw_mems_gyro_Z | ( | ) |
Get raw gyroscope z axis reading from physical gyroscope MEMs sensor (See Ref. Manual 6.5.12)
- Returns
- Reported raw gyroscope z axis reading from physical MEMs sensor.
◆ get_raw_mems_magf()
| void BNO08x::get_raw_mems_magf | ( | uint16_t & | x, |
| uint16_t & | y, | ||
| uint16_t & | z ) |
Get raw magnetometer full reading from physical magnetometer sensor (See Ref. Manual 6.5.15)
- Parameters
-
x Reference variable to save raw X axis data. y Reference variable to save raw Y axis data. z Reference variable to save raw Z axis data.
- Returns
- void, nothing to return
◆ get_raw_mems_magf_X()
| uint16_t BNO08x::get_raw_mems_magf_X | ( | ) |
Get raw magnetometer x axis reading from physical magnetometer sensor (See Ref. Manual 6.5.15)
- Returns
- Reported raw magnetometer x axis reading from physical magnetometer sensor.
◆ get_raw_mems_magf_Y()
| uint16_t BNO08x::get_raw_mems_magf_Y | ( | ) |
Get raw magnetometer y axis reading from physical magnetometer sensor (See Ref. Manual 6.5.15)
- Returns
- Reported raw magnetometer y axis reading from physical magnetometer sensor.
◆ get_raw_mems_magf_Z()
| uint16_t BNO08x::get_raw_mems_magf_Z | ( | ) |
Get raw magnetometer z axis reading from physical magnetometer sensor (See Ref. Manual 6.5.15)
- Returns
- Reported raw magnetometer z axis reading from physical magnetometer sensor.
◆ get_reset_reason()
| BNO08xResetReason BNO08x::get_reset_reason | ( | ) |
Requests product ID, prints the returned info over serial, and returns the reason for the most resent reset.
- Returns
- The reason for the most recent recent reset ( 1 = POR (power on reset), 2 = internal reset, 3 = watchdog timer, 4 = external reset 5 = other)
◆ get_resolution()
| float BNO08x::get_resolution | ( | uint16_t | record_ID | ) |
Gets resolution from BNO08x FRS (flash record system).
- Parameters
-
record_ID Which record ID/ sensor to get resolution value for.
- Returns
- The resolution value for the requested sensor.

◆ get_roll()
| float BNO08x::get_roll | ( | ) |
Get the reported rotation about x axis.
- Returns
- Rotation about the x axis in radians.
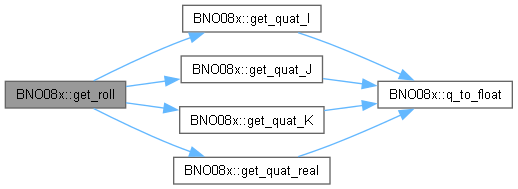

◆ get_roll_deg()
| float BNO08x::get_roll_deg | ( | ) |
Get the reported rotation about x axis.
- Returns
- Rotation about the x axis in degrees.
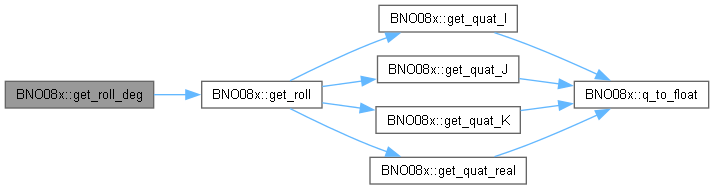
◆ get_stability_classifier()
| BNO08xStability BNO08x::get_stability_classifier | ( | ) |
Get the current stability classifier (Seee Ref. Manual 6.5.31)
- Returns
- The current stability (0 = unknown, 1 = on table, 2 = stationary)
◆ get_step_count()
| uint16_t BNO08x::get_step_count | ( | ) |
Get the counted amount of steps.
- Returns
- The current amount of counted steps.
◆ get_tap_detector()
| uint8_t BNO08x::get_tap_detector | ( | ) |
Get if tap has occured.
- Returns
- 7 bit tap code indicated which axis taps have occurred. (See Ref. Manual 6.5.27)
◆ get_time_stamp()
| uint32_t BNO08x::get_time_stamp | ( | ) |
Return timestamp of most recent report.
- Returns
- uint32_t containing the timestamp of the most recent report in microseconds.
◆ get_uncalibrated_gyro_bias_X()
| float BNO08x::get_uncalibrated_gyro_bias_X | ( | ) |
Get uncalibrated gyro x axis drift estimate.
- Returns
- The angular reported x axis drift estimate.

◆ get_uncalibrated_gyro_bias_Y()
| float BNO08x::get_uncalibrated_gyro_bias_Y | ( | ) |
Get uncalibrated gyro Y axis drift estimate.
- Returns
- The angular reported Y axis drift estimate.

◆ get_uncalibrated_gyro_bias_Z()
| float BNO08x::get_uncalibrated_gyro_bias_Z | ( | ) |
Get uncalibrated gyro Z axis drift estimate.
- Returns
- The angular reported Z axis drift estimate.

◆ get_uncalibrated_gyro_velocity()
| void BNO08x::get_uncalibrated_gyro_velocity | ( | float & | x, |
| float & | y, | ||
| float & | z, | ||
| float & | b_x, | ||
| float & | b_y, | ||
| float & | b_z ) |
Get full rotational velocity without drift compensation (units in Rad/s). An estimate of drift is given but not applied.
- Parameters
-
x Reference variable to save X axis angular velocity y Reference variable to save Y axis angular velocity z Reference variable to save Z axis angular velocity b_x Reference variable to save X axis drift estimate b_y Reference variable to save Y axis drift estimate b_z Reference variable to save Z axis drift estimate
- Returns
- void, nothing to return

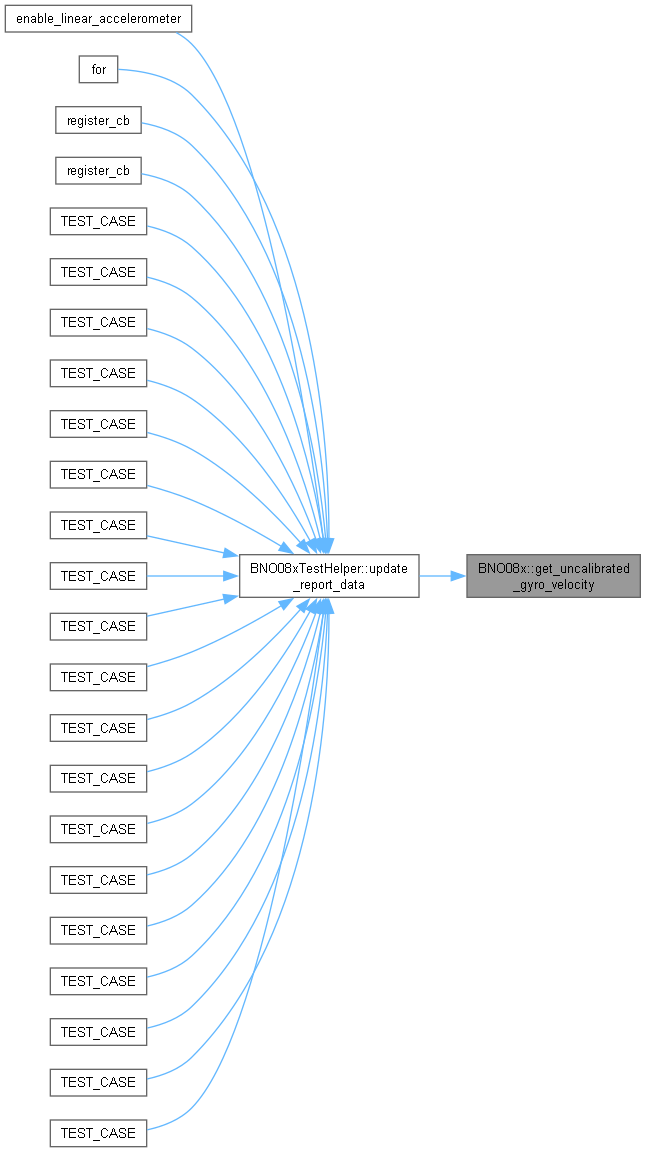
◆ get_uncalibrated_gyro_velocity_X()
| float BNO08x::get_uncalibrated_gyro_velocity_X | ( | ) |
Get uncalibrated gyro x axis angular velocity measurement.
- Returns
- The angular reported x axis angular velocity from uncalibrated gyro.

◆ get_uncalibrated_gyro_velocity_Y()
| float BNO08x::get_uncalibrated_gyro_velocity_Y | ( | ) |
Get uncalibrated gyro Y axis angular velocity measurement.
- Returns
- The angular reported Y axis angular velocity from uncalibrated gyro.

◆ get_uncalibrated_gyro_velocity_Z()
| float BNO08x::get_uncalibrated_gyro_velocity_Z | ( | ) |
Get uncalibrated gyro Z axis angular velocity measurement.
- Returns
- The angular reported Z axis angular velocity from uncalibrated gyro.

◆ get_yaw()
| float BNO08x::get_yaw | ( | ) |
Get the reported rotation about z axis.
- Returns
- Rotation about the z axis in radians.
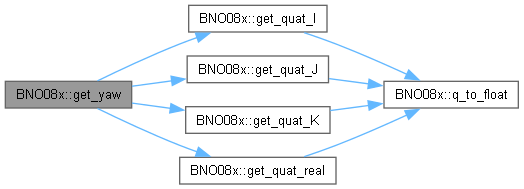

◆ get_yaw_deg()
| float BNO08x::get_yaw_deg | ( | ) |
Get the reported rotation about z axis.
- Returns
- Rotation about the z axis in degrees.
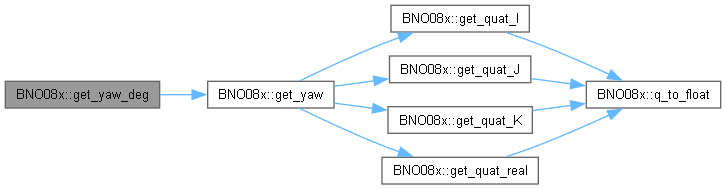
◆ hard_reset()
| bool BNO08x::hard_reset | ( | ) |
Hard resets BNO08x sensor.
- Returns
- void, nothing to return

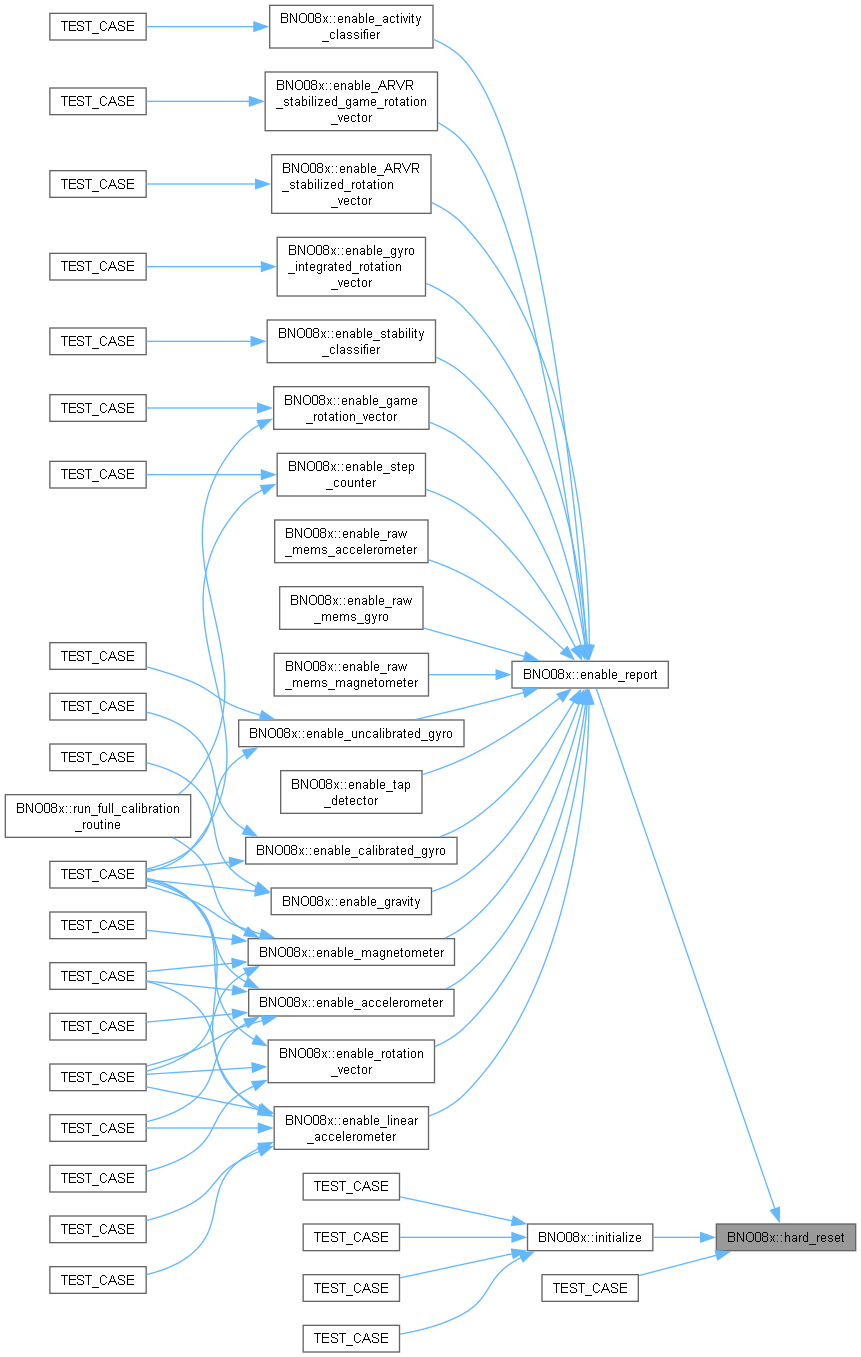
◆ hint_handler()
|
staticprivate |
◆ init_config_args()
|
private |
Initializes required esp-idf SPI data structures with values from user passed bno08x_config_t struct.
- Returns
- ESP_OK if initialization was success.

◆ init_gpio()
|
private |
Initializes required gpio.
- Returns
- ESP_OK if initialization was success.
◆ init_gpio_inputs()
|
private |
Initializes required gpio inputs.
- Returns
- ESP_OK if initialization was success.
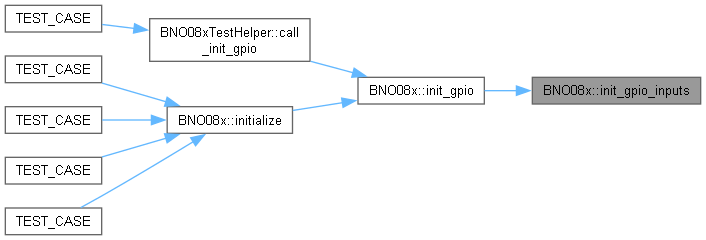
◆ init_gpio_outputs()
|
private |
Initializes required gpio outputs.
- Returns
- ESP_OK if initialization was success.
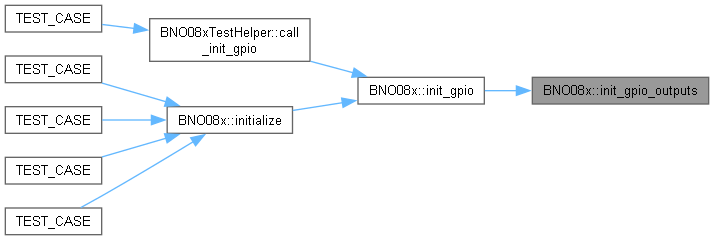
◆ init_hint_isr()
|
private |
Initializes host interrupt ISR.
- Returns
- ESP_OK if initialization was success.


◆ init_spi()
|
private |
Initializes SPI.
- Returns
- ESP_OK if initialization was success.
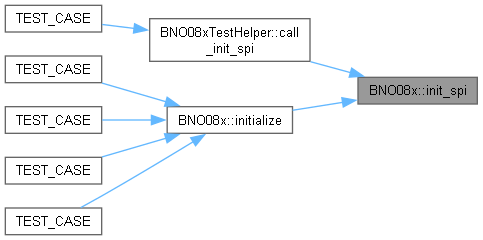
◆ initialize()
| bool BNO08x::initialize | ( | ) |
Initializes BNO08x sensor.
Resets sensor and goes through initialization process. Configures GPIO, required ISRs, and launches two tasks, one to manage SPI transactions, another to process any received data.
- Returns
- True if initialization was success, false if otherwise.
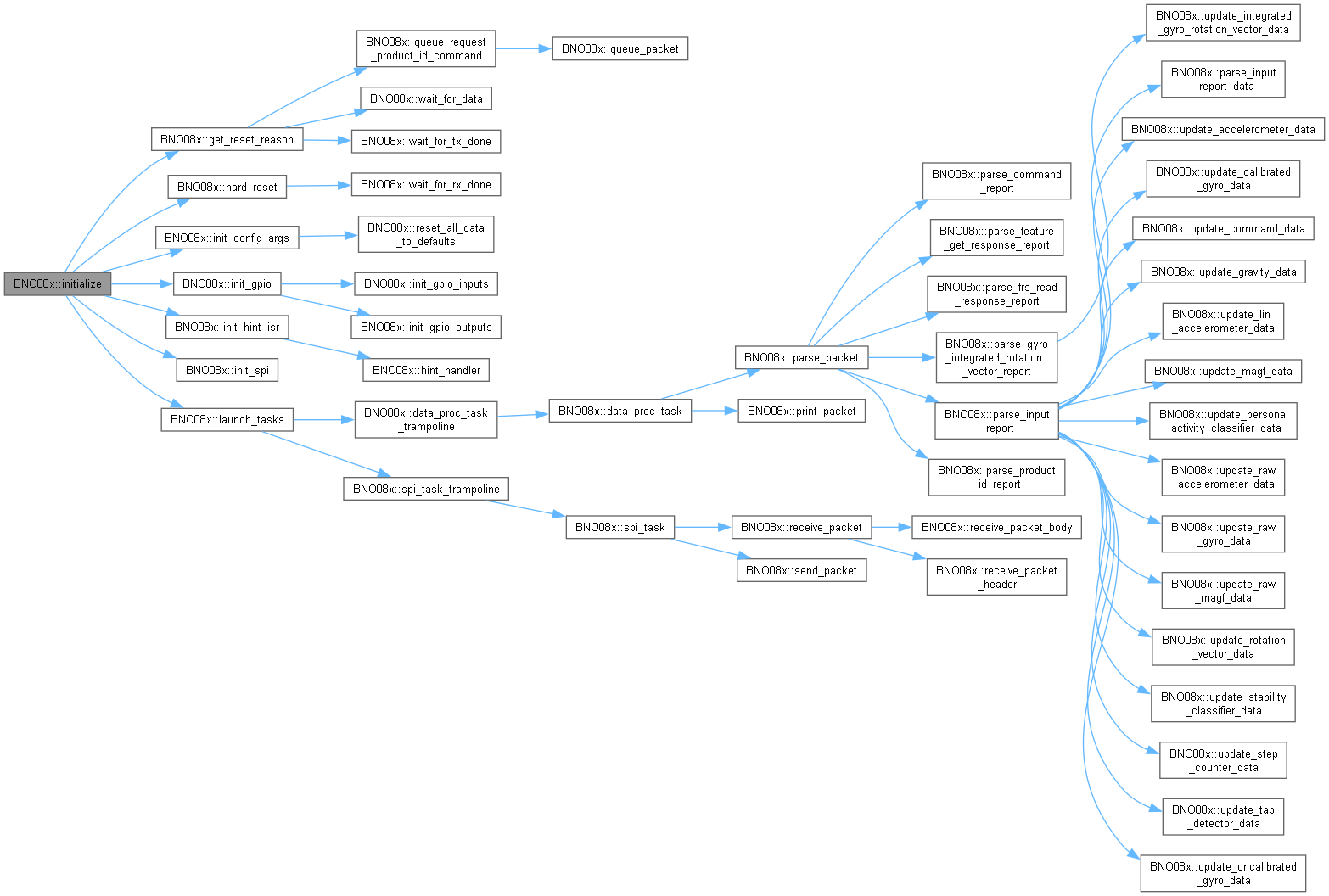
◆ kill_all_tasks()
|
private |
Deletes spi_task and data_proc_task safely on deconstructor call.
- Returns
- ESP_OK if tasks successfully deleted.

◆ launch_tasks()
|
private |
Launches spi_task and data_proc_task on constructor call.
- Returns
- ESP_OK if tasks successfully created.
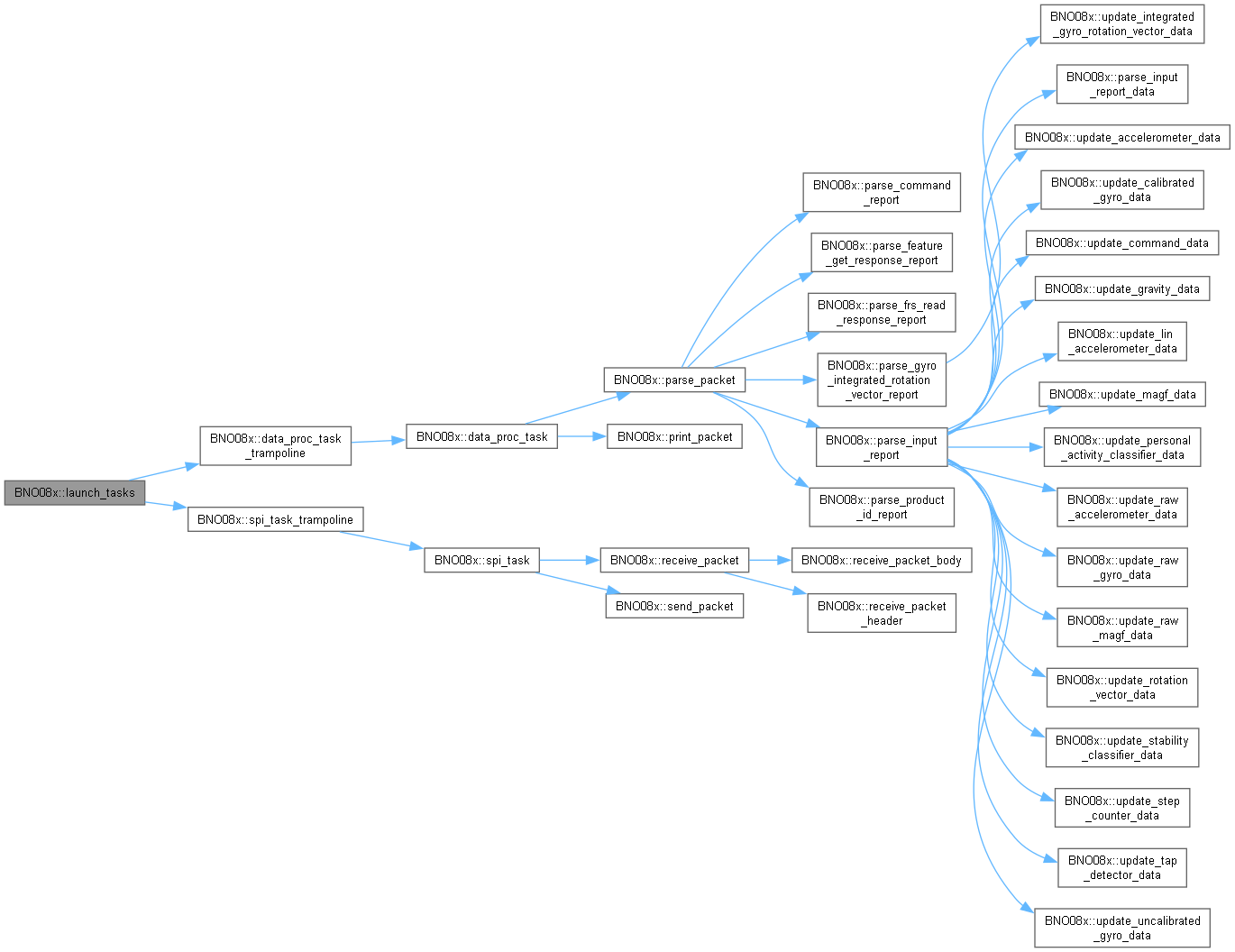
◆ mode_on()
| bool BNO08x::mode_on | ( | ) |
Turns on/ brings BNO08x sensor out of sleep mode using executable channel.
- Returns
- True if exiting sleep mode was success.
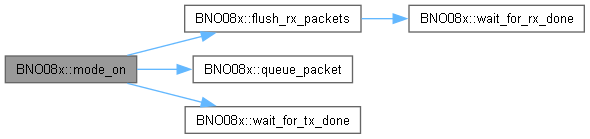
◆ mode_sleep()
| bool BNO08x::mode_sleep | ( | ) |
Puts BNO08x sensor into sleep/low power mode using executable channel.
- Returns
- True if entering sleep mode was success.
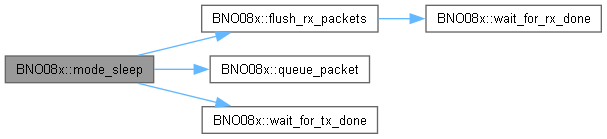
◆ parse_command_report()
|
private |
Parses received command report sent by BNO08x (See Ref. Manual 6.3.9)
- Returns
- The command report ID, 0 if invalid.

◆ parse_feature_get_response_report()
|
private |
Parses get feature request report received from BNO08x.
Note there is no means in this library currently to request feature reports, this is simply to handle the unsolicited get feature request reports that come with report rate changes (ie when a report is disabled by setting it 0) such that they aren't detected as invalid packets.
"6.5.5 of SH-2 Ref manual: "Note that SH-2 protocol version 1.0.1 and higher will send Get Feature Response messages unsolicited if a sensor’s rate changes (e.g. due to change in the rate of a related sensor."
- Parameters
-
packet bno8x_rx_packet_t containing the get feature request report to parse.
- Returns
- The report ID of the respective sensor, for ex. SENSOR_REPORT_ID_ACCELEROMETER, 0 if invalid.

◆ parse_frs_read_response_report()
|
private |
Sends packet to be parsed to meta data function call (FRS_read_data()) through queue.
- Parameters
-
packet The packet containing the frs read report.
- Returns
- 1, always valid, parsing for this happens in frs_read_word()

◆ parse_gyro_integrated_rotation_vector_report()
|
private |
Parses received gyro integrated rotation vector report sent by BNO08x.
Unit responds with packet that contains the following:
packet->header[0:3]: First, a 4 byte header packet->body[0:1]: Raw quaternion component I packet->body[2:3]: Raw quaternion component J packet->body[4:5]: Raw quaternion component K packet->body[6:7]: Raw quaternion real component packet->body[8:9]: Raw gyroscope angular velocity in X axis packet->body[10:11]: Raw gyroscope angular velocity in Y axis packet->body[12:13]: Raw gyroscope angular velocity in Z axis
- Parameters
-
packet bno8x_rx_packet_t containing the gyro integrated rotation vector report report to parse
- Returns
- Integrated rotation vector report ID (always valid)


◆ parse_input_report()
|
private |
Parses received input report sent by BNO08x.
Unit responds with packet that contains the following:
packet->header[0:3]: First, a 4 byte header packet->body[0:4]: Then a 5 byte timestamp of microsecond ticks since reading was taken packet->body[5 + 0]: Then a feature report ID (0x01 for Accel, 0x05 for Rotation Vector, etc...) packet->body[5 + 1]: Sequence number (See Ref.Manual 6.5.8.2) packet->body[5 + 2]: Status packet->body[3]: Delay packet->body[4:5]: i/accel x/gyro x/etc packet->body[6:7]: j/accel y/gyro y/etc packet->body[8:9]: k/accel z/gyro z/etc packet->body[10:11]: real/gyro temp/etc packet->body[12:13]: Accuracy estimate
- Parameters
-
packet bno8x_rx_packet_t containing the input report to parse
- Returns
- The report ID of the respective sensor, for ex. SENSOR_REPORT_ID_ACCELEROMETER, 0 if invalid.
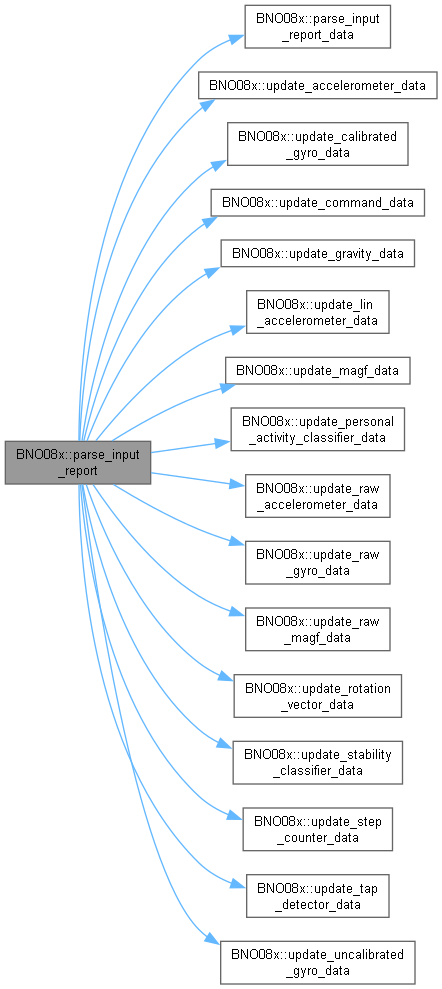

◆ parse_input_report_data()
|
private |
Parses data from received input report.
- Parameters
-
packet bno8x_rx_packet_t containing the input report to parse data uint16_t array to store parsed data in data_length length of data in bytes parsed from packet header
- Returns
- void, nothing to return

◆ parse_packet()
|
private |
Parses a packet received from bno08x, updating any data according to received reports.
- Parameters
-
packet The packet to be parsed. notify_users Bool reference that is set to true if users should be notified of new data through callbacks/polling, false if packet is valid but users don't need to be notified.
- Returns
- 0 if invalid packet, non-zero if otherwise.
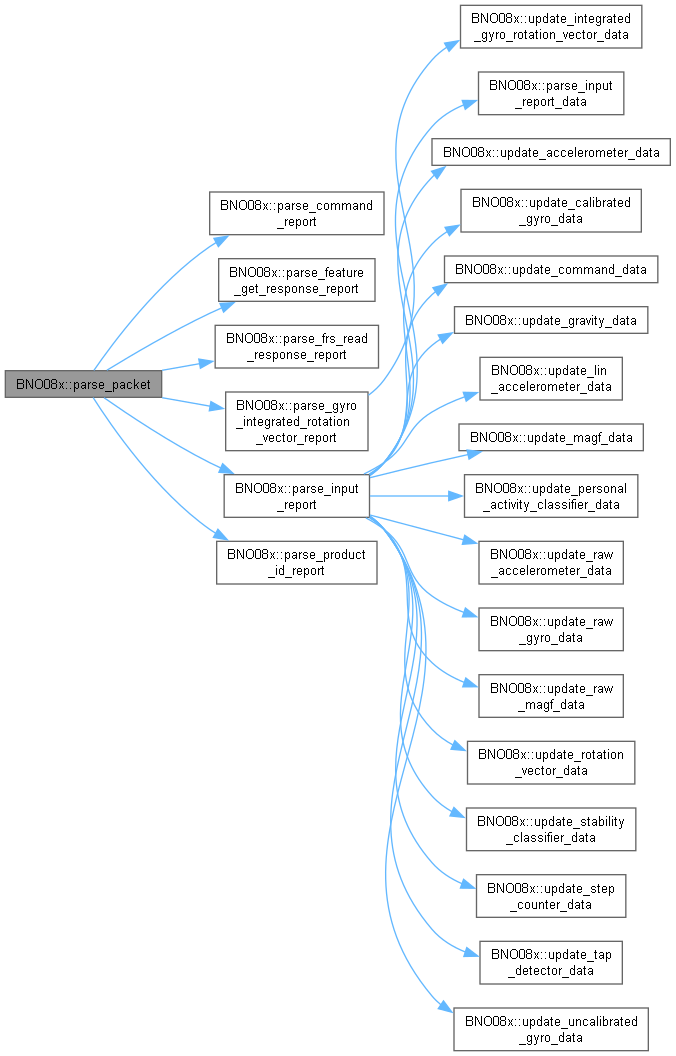
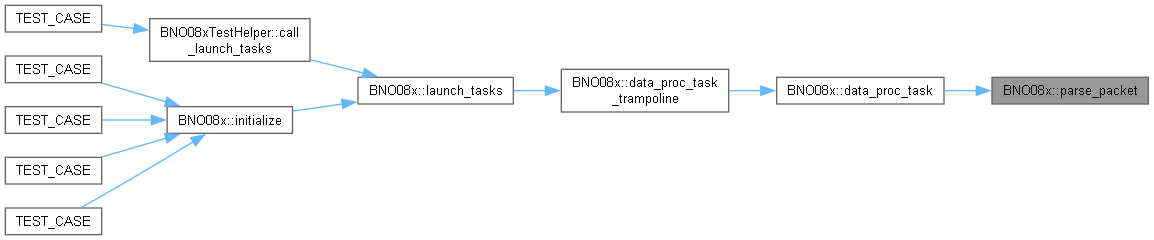
◆ parse_product_id_report()
|
private |
Parses product id report and prints device info.
- Parameters
-
packet The packet containing product id report.
- Returns
- 1, always valid.

◆ print_header()
|
private |
Prints the header of the passed SHTP packet to serial console with ESP_LOG statement.
- Parameters
-
packet The packet containing the header to be printed.
- Returns
- void, nothing to return
◆ print_packet()
|
private |
Prints the passed SHTP packet to serial console with ESP_LOG statement.
- Parameters
-
packet The packet to be printed.
- Returns
- void, nothing to return
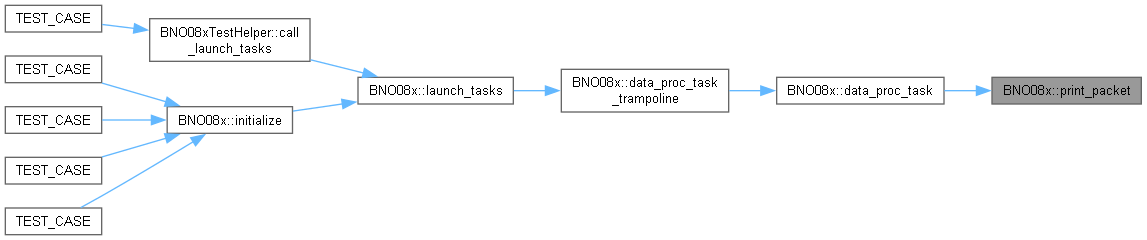
◆ q_to_float()
| float BNO08x::q_to_float | ( | int16_t | fixed_point_value, |
| uint8_t | q_point ) |
Converts a register value to a float using its associated Q point. (See https://en.wikipedia.org/wiki/Q_(number_format))
- Parameters
-
q_point Q point value associated with register. fixed_point_value The fixed point value to convert.
- Returns
- void, nothing to return
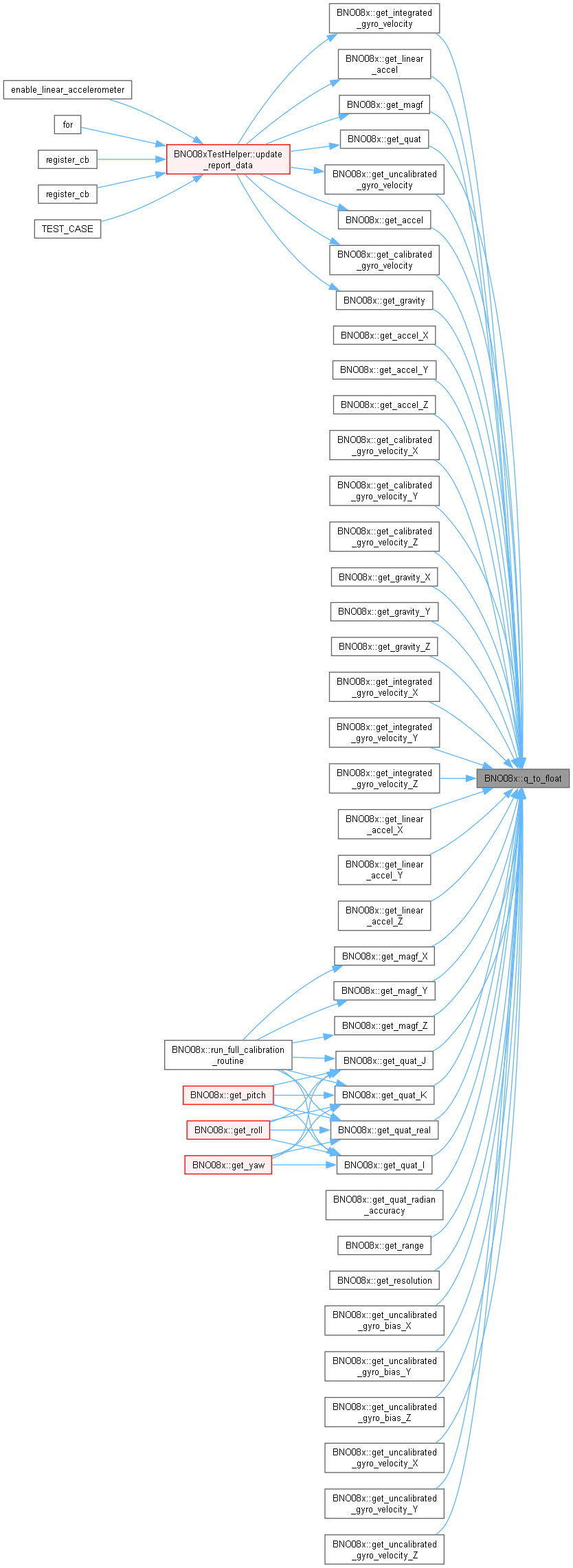
◆ queue_calibrate_command()
|
private |
Queues a packet containing a command to calibrate the specified sensor.
- Parameters
-
sensor_to_calibrate The sensor to calibrate.
- Returns
- void, nothing to return

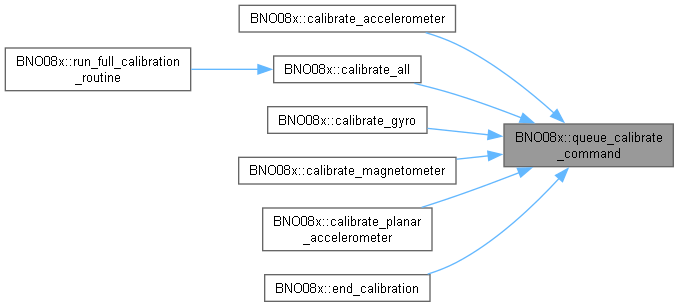
◆ queue_command()
|
private |
Queues a packet containing a command.
- Parameters
-
command The command to be sent. commands Command data array, pre-packed with exception of first 3 elements (command info)
- Returns
- void, nothing to return

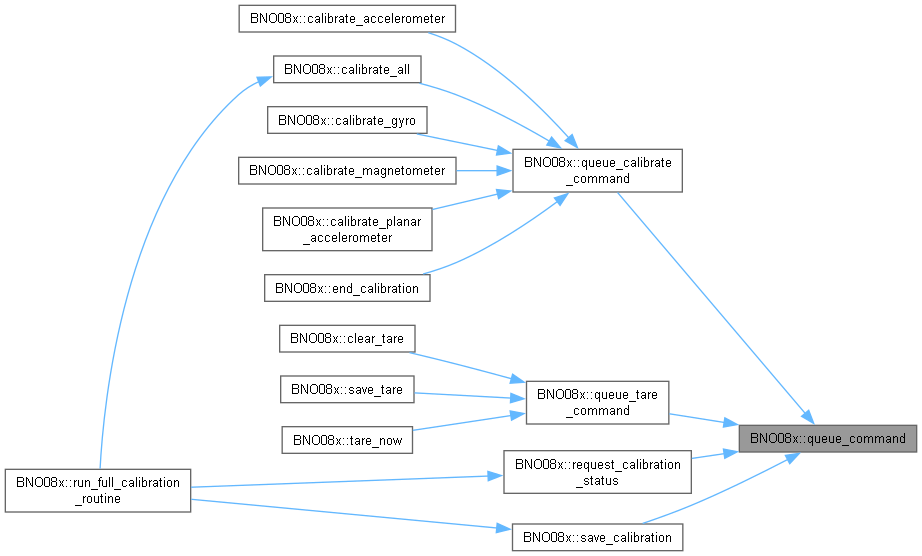
◆ queue_feature_command()
|
private |
Queues a packet containing a command with a request for sensor reports, reported periodically. (See Ref. Manual 6.5.4)
- Parameters
-
report_ID ID of sensor report to be enabled. time_between_reports Desired time between reports in microseconds. specific_config Specific config word (used with personal activity classifier)
- Returns
- void, nothing to return

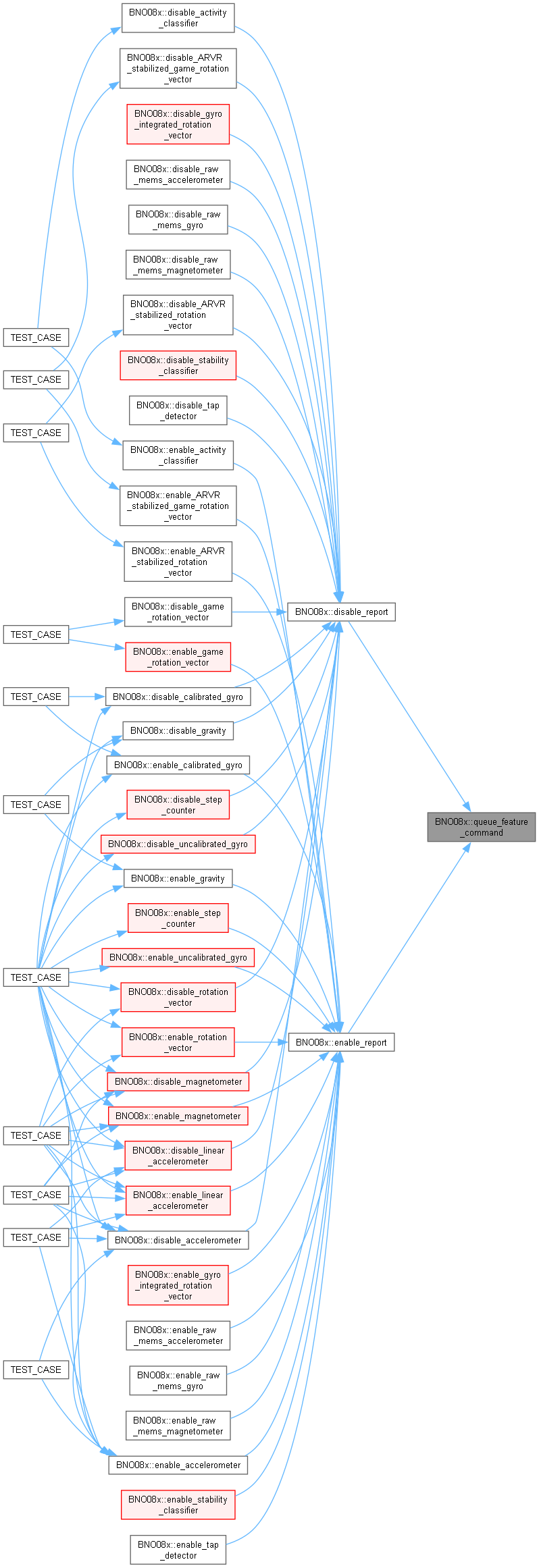
◆ queue_packet()
|
private |
Queues an SHTP packet to be sent via SPI.
- Parameters
-
SHTP channel number data_length data length in bytes commands array containing data to be sent
- Returns
- void, nothing to return
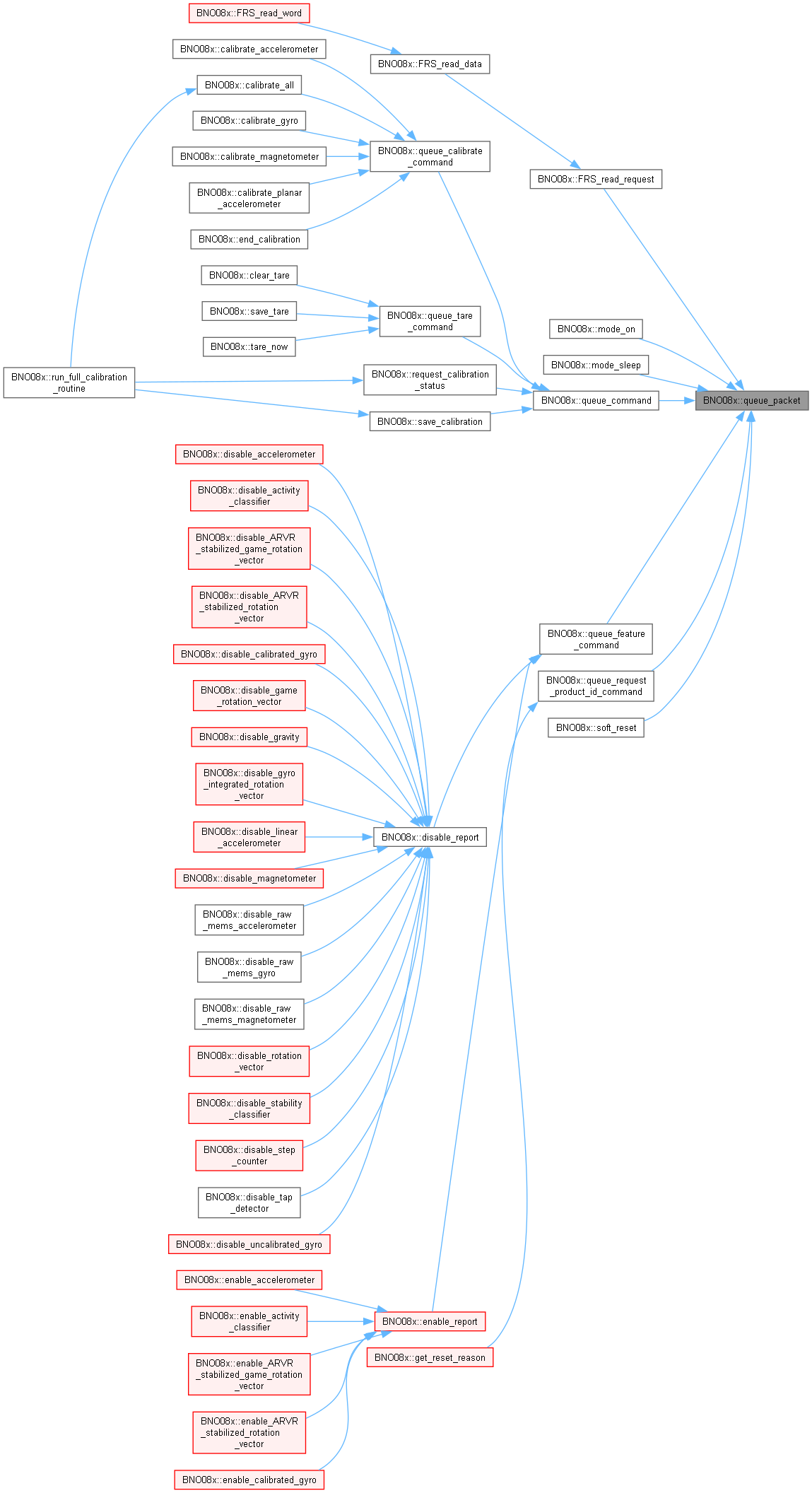
◆ queue_request_product_id_command()
|
private |
Queues a packet containing the request product ID command.
- Returns
- void, nothing to return

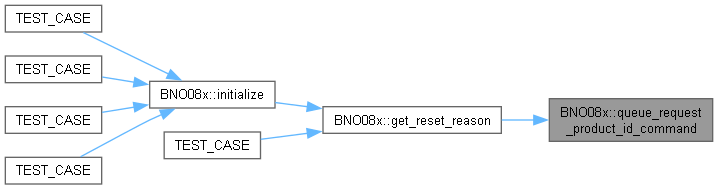
◆ queue_tare_command()
|
private |
Queues a packet containing a command related to zeroing sensor's axes. (See Ref. Manual 6.4.4.1)
- Parameters
-
command Tare command to be sent. axis Specified axis (can be z or all at once) rotation_vector_basis Which rotation vector type to zero axes of, BNO08x saves seperate data for Rotation Vector, Gaming Rotation Vector, etc..)
- Returns
- void, nothing to return

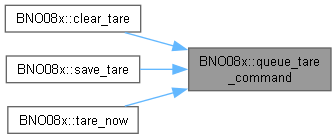
◆ receive_packet()
|
private |
Receives a SHTP packet via SPI and sends it to data_proc_task()
- Returns
- void, nothing to return
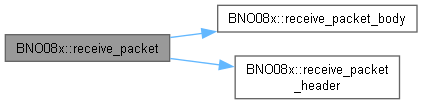
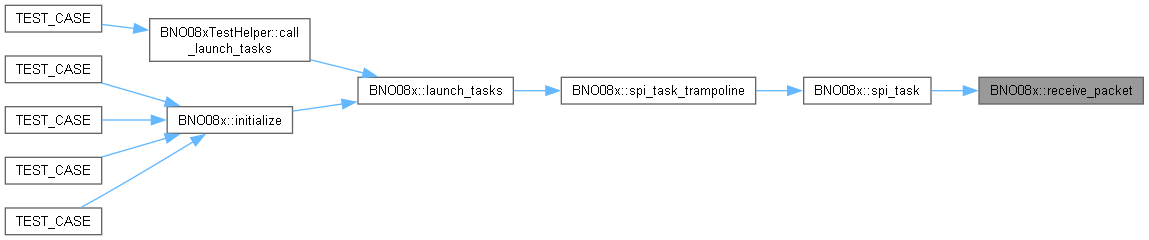
◆ receive_packet_body()
|
private |
Receives a SHTP packet body via SPI.
- Parameters
-
packet Pointer to bno08x_rx_packet_t to save body to.
- Returns
- ESP_OK if receive was success.

◆ receive_packet_header()
|
private |
Receives a SHTP packet header via SPI.
- Parameters
-
packet Pointer to bno08x_rx_packet_t to save header to.
- Returns
- ESP_OK if receive was success.

◆ register_cb()
| void BNO08x::register_cb | ( | std::function< void()> | cb_fxn | ) |
Registers a callback to execute when new data from a report is received.
- Parameters
-
cb_fxn Pointer to the call-back function should be of void return type and void input parameters.
- Returns
- void, nothing to return
◆ report_ID_to_report_period_tracker_idx()
|
staticprivate |
Converts report id to respective index in report_period_trackers.
- Parameters
-
report_ID report ID to return index for.
- Returns
- Index in report_period_trackers corresponding to passed report ID.
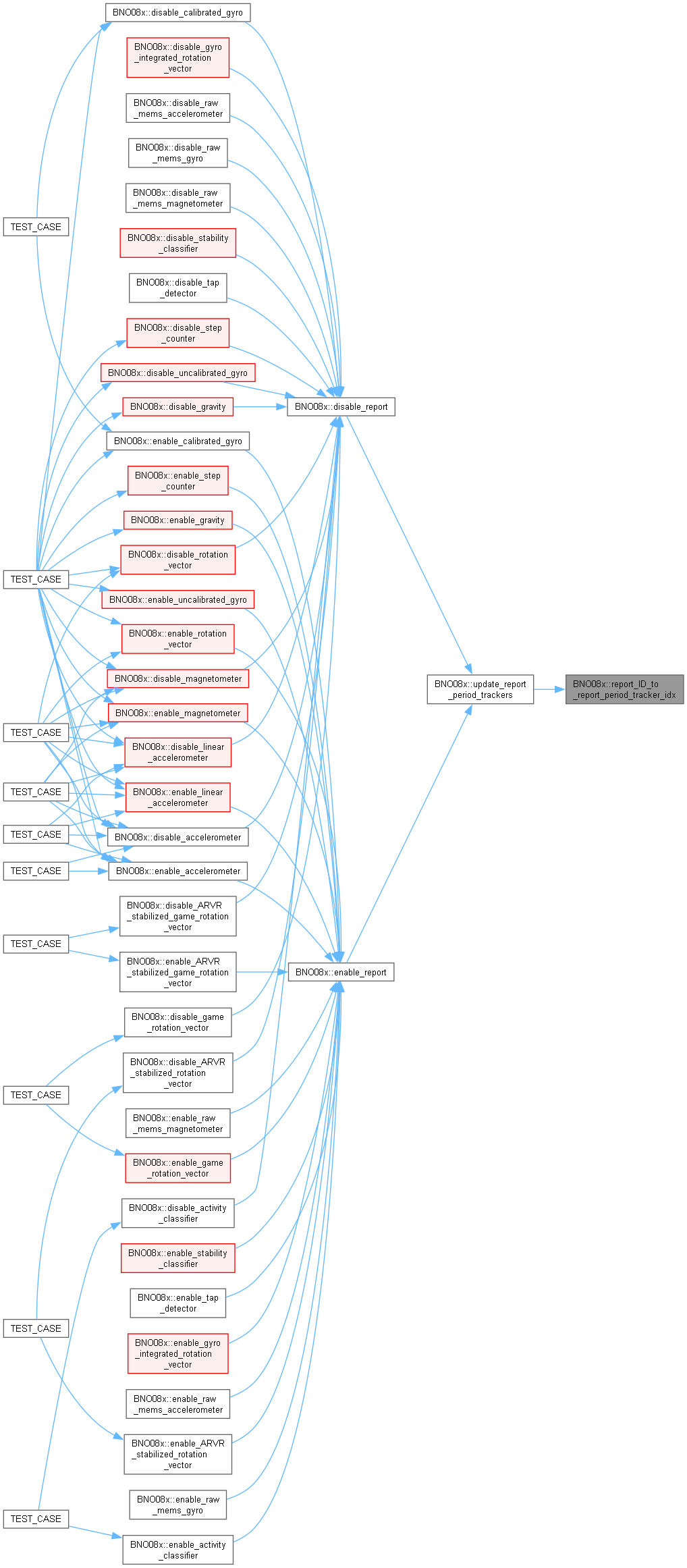
◆ request_calibration_status()
| void BNO08x::request_calibration_status | ( | ) |
Requests ME calibration status from BNO08x (see Ref. Manual 6.4.7.2)
- Returns
- void, nothing to return


◆ reset_all_data_to_defaults()
| void BNO08x::reset_all_data_to_defaults | ( | ) |
Resets all data returned by public getter APIs to initial values of 0 and low accuracy.
- Returns
- void, nothing to return
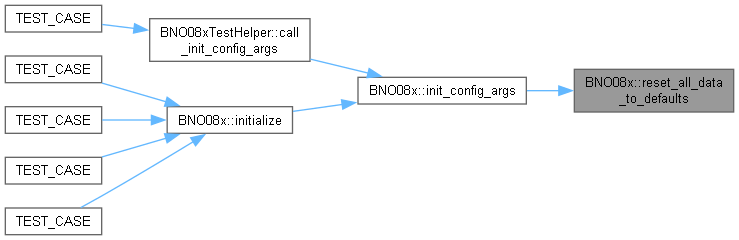
◆ run_full_calibration_routine()
| bool BNO08x::run_full_calibration_routine | ( | ) |
Runs full calibration routine.
Enables game rotation vector and magnetometer, starts ME calibration process. Waits for accuracy of returned quaternions and magnetic field vectors to be high, then saves calibration data and returns.
- Returns
- True if calibration succeeded, false if otherwise.
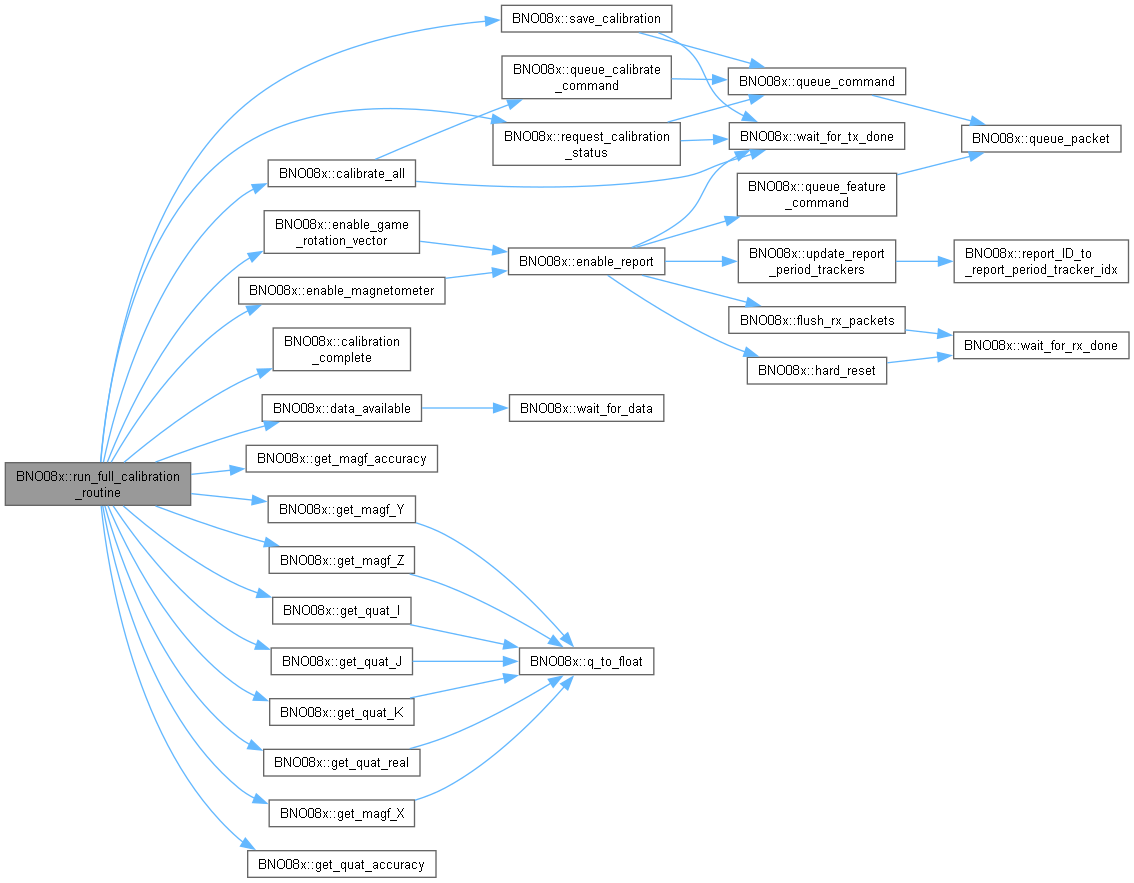
◆ save_calibration()
| void BNO08x::save_calibration | ( | ) |
Sends command to save internal calibration data (See Ref. Manual 6.4.7).
- Returns
- void, nothing to return


◆ save_tare()
| void BNO08x::save_tare | ( | ) |
Sends command to save tare into non-volatile memory of BNO08x (See Ref. Manual 6.4.4.2)
- Returns
- void, nothing to return

◆ send_packet()
|
private |
Sends a queued SHTP packet via SPI.
- Parameters
-
packet The packet queued to be sent.
- Returns
- void, nothing to return
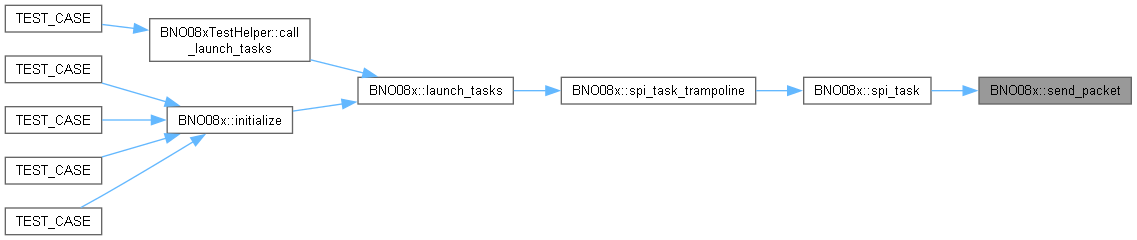
◆ soft_reset()
| bool BNO08x::soft_reset | ( | ) |
Soft resets BNO08x sensor using executable channel.
- Returns
- True if reset was success.
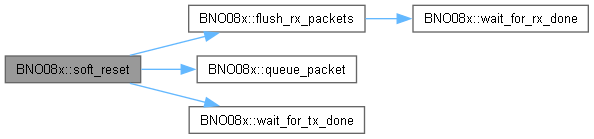
◆ spi_task()
|
private |
Task responsible for SPI transactions. Executed when HINT in is asserted by BNO08x.
- Returns
- void, nothing to return

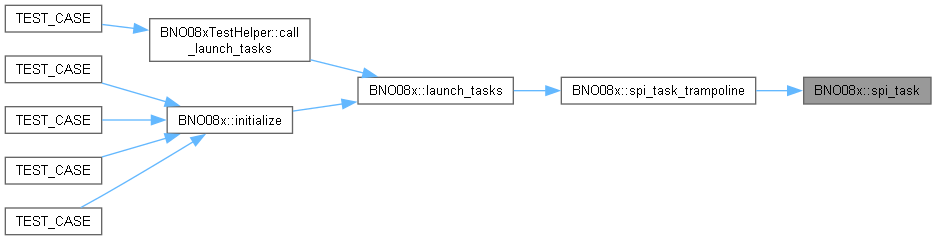
◆ spi_task_trampoline()
|
staticprivate |
Static function used to launch spi task.
Used such that spi_task() can be non-static class member.
- Parameters
-
arg void pointer to BNO08x imu object
- Returns
- void, nothing to return

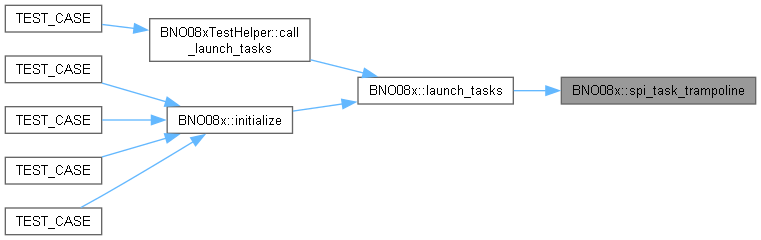
◆ tare_now()
| void BNO08x::tare_now | ( | uint8_t | axis_sel = TARE_AXIS_ALL, |
| uint8_t | rotation_vector_basis = TARE_ROTATION_VECTOR ) |
Sends command to tare an axis (See Ref. Manual 6.4.4.1)
- Parameters
-
axis_sel Which axes to zero, can be TARE_AXIS_ALL (all axes) or TARE_AXIS_Z (only yaw) rotation_vector_basis Which rotation vector type to zero axes can be TARE_ROTATION_VECTOR, TARE_GAME_ROTATION_VECTOR, TARE_GEOMAGNETIC_ROTATION_VECTOR, etc..
- Returns
- void, nothing to return

◆ update_accelerometer_data()
|
private |
Updates accelerometer data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ update_calibrated_gyro_data()
|
private |
Updates linear gyro data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ update_command_data()
|
private |
Updates command data from parsed input report.
- Parameters
-
packet bno08x_rx_packet_t containing the packet with command response report.
- Returns
- void, nothing to return

◆ update_gravity_data()
|
private |
Updates gravity data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ update_integrated_gyro_rotation_vector_data()
|
private |
Updates integrated gyro rotation vector data from SHTP channel 5 (CHANNEL_GYRO) special report data.
- Parameters
-
packet bno08x_rx_packet_t containing the packet with command response report.
- Returns
- void, nothing to return

◆ update_lin_accelerometer_data()
|
private |
Updates linear accelerometer data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ update_magf_data()
|
private |
Updates magnetic field data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ update_personal_activity_classifier_data()
|
private |
Updates activity classifier data from parsed input report.
- Parameters
-
packet bno08x_rx_packet_t containing the packet with activity classifier report.
- Returns
- void, nothing to return

◆ update_raw_accelerometer_data()
|
private |
Updates raw accelerometer data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data.
- Returns
- void, nothing to return

◆ update_raw_gyro_data()
|
private |
Updates raw gyro data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data.
- Returns
- void, nothing to return

◆ update_raw_magf_data()
|
private |
Updates raw magnetic field data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data.
- Returns
- void, nothing to return

◆ update_report_period_trackers()
|
private |
Updates period of respective report in report_period_trackers and recalculates host_int_timeout_ms according to next longest report period.
- Parameters
-
report_ID report ID to update period of.
- Returns
- void, nothing to return

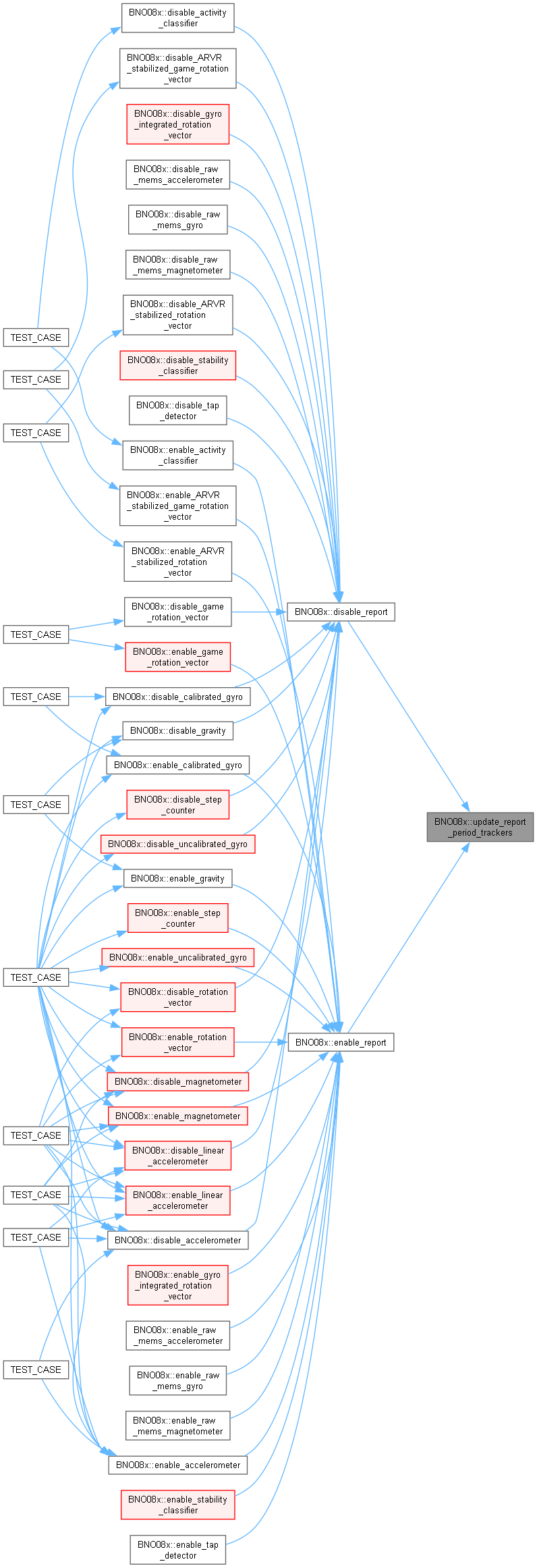
◆ update_rotation_vector_data()
|
private |
Updates roation vector data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ update_stability_classifier_data()
|
private |
Updates stability classifier data from parsed input report.
- Parameters
-
packet bno08x_rx_packet_t containing the packet with stability classifier report.
- Returns
- void, nothing to return

◆ update_step_counter_data()
|
private |
Updates step counter data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data.
- Returns
- void, nothing to return

◆ update_tap_detector_data()
|
private |
Updates tap detector data from parsed input report.
- Parameters
-
packet bno08x_rx_packet_t containing the packet with tap detector report.
- Returns
- void, nothing to return

◆ update_uncalibrated_gyro_data()
|
private |
Updates uncalibrated gyro data from parsed input report.
- Parameters
-
data uint16_t array containing parsed input report data. status uint8_t containing parsed status bits (represents accuracy)
- Returns
- void, nothing to return

◆ wait_for_data()
|
private |
Waits for a valid or invalid packet to be received or host_int_timeout_ms to elapse.
If no reports are currently enabled the hint pin interrupt will be re-enabled by this function.
- Returns
- True if valid packet has been received within host_int_timeout_ms, false if otherwise.
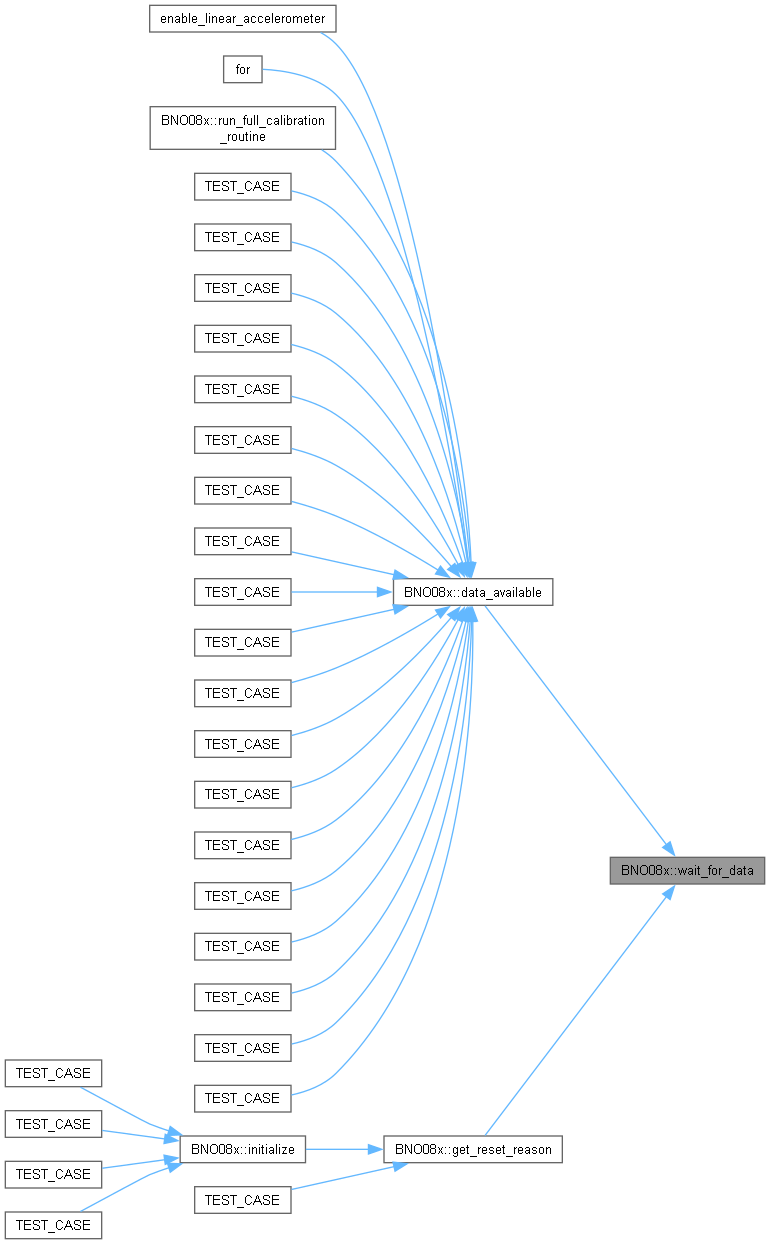
◆ wait_for_rx_done()
|
private |
Waits for data to be received over SPI, or host_int_timeout_ms to elapse.
If no reports are currently enabled the hint pin interrupt will be re-enabled by this function. This function is for when the validity of packets is not a concern, it is for flushing packets we do not care about.
- Returns
- True if data has been received over SPI within host_int_timeout_ms.
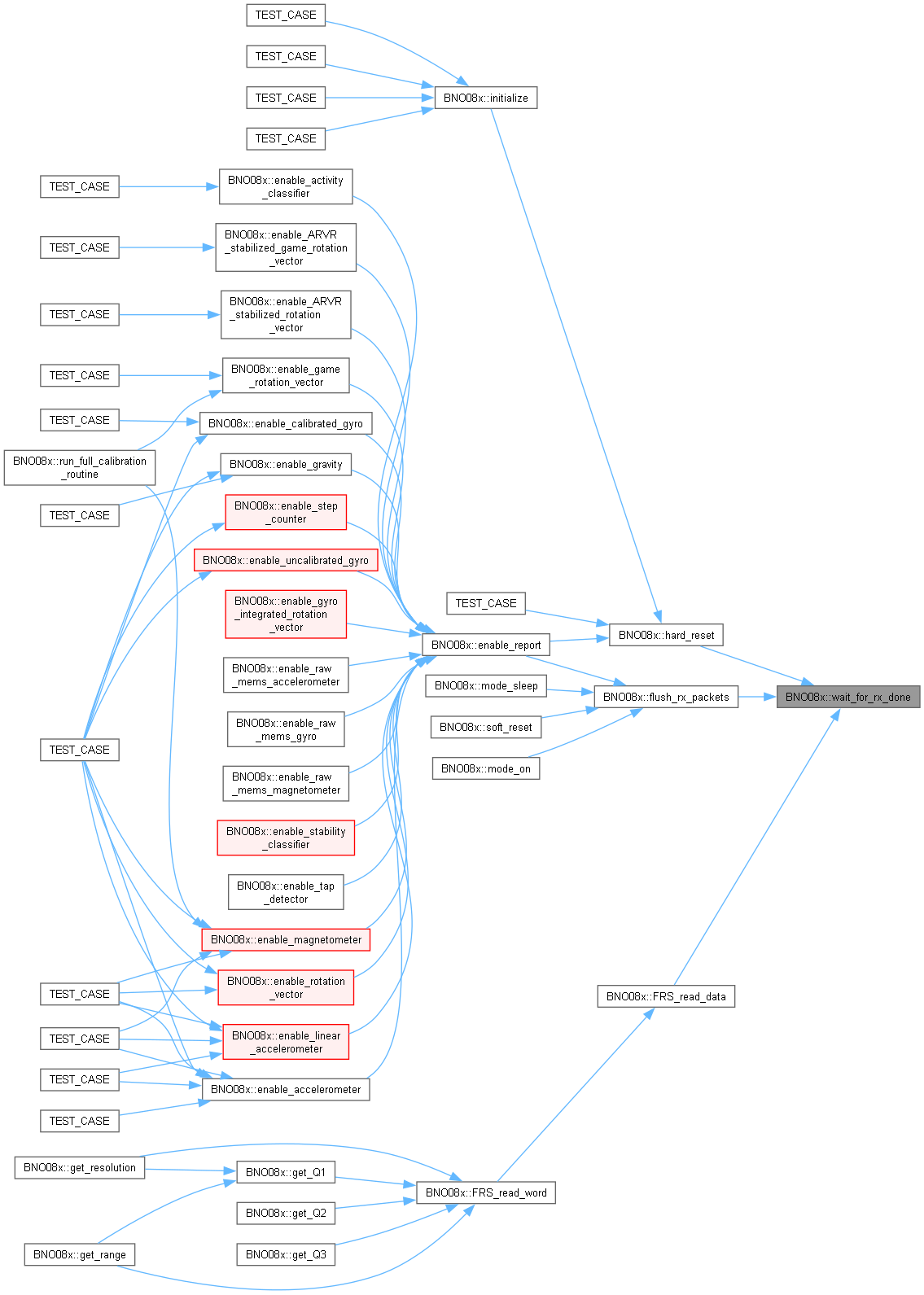
◆ wait_for_tx_done()
|
private |
Waits for a queued packet to be sent or host_int_timeout_ms to elapse.
If no reports are currently enabled the hint pin interrupt will be re-enabled by this function.
- Returns
- True if packet was sent within host_int_timeout_ms, false if otherwise.
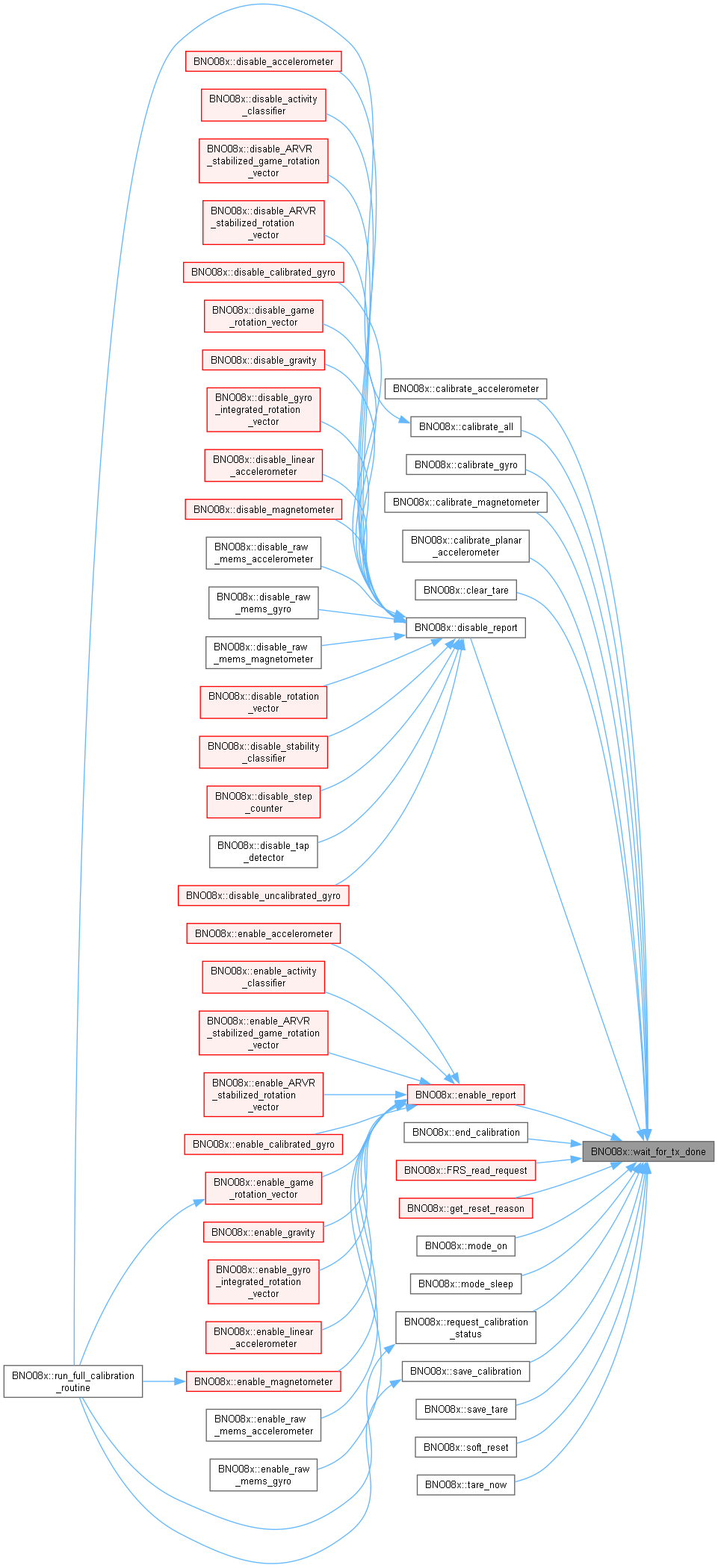
Friends And Related Symbol Documentation
◆ BNO08xTestHelper
|
friend |
Member Data Documentation
◆ accel_accuracy
|
private |
Raw acceleration readings (See SH-2 Ref. Manual 6.5.8)
◆ accel_lin_accuracy
|
private |
Raw linear acceleration (See SH-2 Ref. Manual 6.5.10)
◆ ACCELEROMETER_Q1
|
staticconstexpr |
Acceleration Q point (See SH-2 Ref. Manual 6.5.9)
◆ activity_classifier
|
private |
BNO08xActivity status reading (See SH-2 Ref. Manual 6.5.36)
◆ activity_confidences
|
private |
Confidence of read activities (See SH-2 Ref. Manual 6.5.36)
◆ ANGULAR_VELOCITY_Q1
|
staticconstexpr |
Angular velocity Q point (See SH-2 Ref. Manual 6.5.44)
◆ bus_config
|
private |
SPI bus GPIO configuration settings.
◆ CALIBRATE_ACCEL
|
staticconstexprprivate |
Calibrate accelerometer command used by queue_calibrate_command.
◆ CALIBRATE_ACCEL_GYRO_MAG
|
staticconstexprprivate |
Calibrate accelerometer, gyro, & magnetometer command used by queue_calibrate_command.
◆ CALIBRATE_GYRO
|
staticconstexprprivate |
Calibrate gyro command used by queue_calibrate_command.
◆ CALIBRATE_MAG
|
staticconstexprprivate |
Calibrate magnetometer command used by queue_calibrate_command.
◆ CALIBRATE_PLANAR_ACCEL
|
staticconstexprprivate |
Calibrate planar acceleration command used by queue_calibrate_command.
◆ CALIBRATE_STOP
|
staticconstexprprivate |
Stop calibration command used by queue_calibrate_command.
◆ calibration_status
|
private |
Calibration status of device (See SH-2 Ref. Manual 6.4.7.1 & 6.4.7.2)
◆ cb_list
|
private |
◆ CMD_EXECUTION_DELAY_MS
|
staticconstexprprivate |
How long to delay after queueing command to allow it to execute (for ex. after sending command to enable report).
◆ COMMAND_CLEAR_DCD
|
staticconstexprprivate |
Clear DCD & Reset command (See SH2 Ref. Manual 6.4)
◆ COMMAND_COUNTER
|
staticconstexprprivate |
◆ COMMAND_DCD
|
staticconstexprprivate |
Save DCD command (See SH2 Ref. Manual 6.4.7)
◆ COMMAND_DCD_PERIOD_SAVE
|
staticconstexprprivate |
Configure DCD periodic saving (See SH2 Ref. Manual 6.4)
◆ COMMAND_ERRORS
|
staticconstexprprivate |
◆ COMMAND_INITIALIZE
|
staticconstexprprivate |
Reinitialize sensor hub components See (SH2 Ref. Manual 6.4.5)
◆ COMMAND_ME_CALIBRATE
|
staticconstexprprivate |
Command and response to configure ME calibration (See SH2 Ref. Manual 6.4.7)
◆ COMMAND_OSCILLATOR
|
staticconstexprprivate |
Retrieve oscillator type command (See SH2 Ref. Manual 6.4)
◆ COMMAND_TARE
|
staticconstexprprivate |
Command and response to tare command (See Sh2 Ref. Manual 6.4.4)
◆ current_slowest_report_ID
|
private |
ID of the currently enabled report with the largest sample period.
◆ data_proc_task_hdl
|
private |
data_proc_task() task handle
◆ evt_grp_report_en
|
private |
Event group for indicating which reports are currently enabled.
◆ EVT_GRP_RPT_ACCELEROMETER_BIT
|
staticconstexprprivate |
When set, accelerometer reports are active.
◆ EVT_GRP_RPT_ACTIVITY_CLASSIFIER_BIT
|
staticconstexprprivate |
When set, activity classifier reports are active.
◆ EVT_GRP_RPT_ALL_BITS
|
staticconstexprprivate |
◆ EVT_GRP_RPT_ARVR_S_GAME_ROTATION_VECTOR_BIT
|
staticconstexprprivate |
When set, ARVR stabilized game rotation vector reports are active.
◆ EVT_GRP_RPT_ARVR_S_ROTATION_VECTOR_BIT
|
staticconstexprprivate |
When set, ARVR stabilized rotation vector reports are active.
◆ EVT_GRP_RPT_GAME_ROTATION_VECTOR_BIT
|
staticconstexprprivate |
When set, game rotation vector reports are active.
◆ EVT_GRP_RPT_GRAVITY_BIT
|
staticconstexprprivate |
When set, gravity reports are active.
◆ EVT_GRP_RPT_GYRO_BIT
|
staticconstexprprivate |
When set, gyro reports are active.
◆ EVT_GRP_RPT_GYRO_ROTATION_VECTOR_BIT
|
staticconstexprprivate |
When set, gyro integrator rotation vector reports are active.
◆ EVT_GRP_RPT_GYRO_UNCALIBRATED_BIT
|
staticconstexprprivate |
When set, uncalibrated gyro reports are active.
◆ EVT_GRP_RPT_LINEAR_ACCELEROMETER_BIT
|
staticconstexprprivate |
When set, linear accelerometer reports are active.
◆ EVT_GRP_RPT_MAGNETOMETER_BIT
|
staticconstexprprivate |
When set, magnetometer reports are active.
◆ EVT_GRP_RPT_RAW_ACCELEROMETER_BIT
|
staticconstexprprivate |
When set, raw accelerometer reports are active.
◆ EVT_GRP_RPT_RAW_GYRO_BIT
|
staticconstexprprivate |
When set, raw gyro reports are active.
◆ EVT_GRP_RPT_RAW_MAGNETOMETER_BIT
|
staticconstexprprivate |
When set, raw magnetometer reports are active.
◆ EVT_GRP_RPT_ROTATION_VECTOR_BIT
|
staticconstexprprivate |
When set, rotation vector reports are active.
◆ EVT_GRP_RPT_STABILITY_CLASSIFIER_BIT
|
staticconstexprprivate |
When set, stability classifier reports are active.
◆ EVT_GRP_RPT_STEP_COUNTER_BIT
|
staticconstexprprivate |
When set, step counter reports are active.
◆ EVT_GRP_RPT_TAP_DETECTOR_BIT
|
staticconstexprprivate |
When set, tap detector reports are active.
◆ evt_grp_spi
|
private |
Event group for indicating when bno08x hint pin has triggered and when new data has been processed. Used by calls to sending or receiving functions.
◆ EVT_GRP_SPI_RX_DONE_BIT
|
staticconstexprprivate |
When this bit is set it indicates a receive procedure has completed.
◆ EVT_GRP_SPI_RX_INVALID_PACKET_BIT
|
staticconstexprprivate |
When this bit is set, it indicates an invalid packet has been received.
◆ EVT_GRP_SPI_RX_VALID_PACKET_BIT
|
staticconstexprprivate |
When this bit is set, it indicates a valid packet has been received and processed.
◆ EVT_GRP_SPI_TX_DONE_BIT
|
staticconstexprprivate |
When this bit is set, it indicates a queued packet has been sent.
◆ evt_grp_task_flow
|
private |
Event group for indicating when tasks should complete and self-delete (on deconstructor call)
◆ EVT_GRP_TSK_FLW_RUNNING_BIT
|
staticconstexprprivate |
When set, data_proc_task and spi_task are active, when 0 they are pending deletion or deleted.
◆ first_boot
|
private |
true only for first execution of hard_reset(), used to suppress the printing of product ID report.
◆ FRS_RECORD_ID_ACCELEROMETER
|
staticconstexpr |
Accelerometer record ID, to be passed in metadata functions like get_Q1()
◆ FRS_RECORD_ID_GYROSCOPE_CALIBRATED
|
staticconstexpr |
Calirated gyroscope record ID, to be passed in metadata functions like get_Q1()
◆ FRS_RECORD_ID_MAGNETIC_FIELD_CALIBRATED
|
staticconstexpr |
Calibrated magnetometer record ID, to be passed in metadata functions like get_Q1()
◆ FRS_RECORD_ID_ROTATION_VECTOR
|
staticconstexpr |
Rotation vector record ID, to be passed in metadata functions like get_Q1()
◆ gravity_accuracy
|
private |
Gravity reading in m/s^2 (See SH-2 Ref. Manual 6.5.11)
◆ GRAVITY_Q1
|
staticconstexpr |
Gravity Q point (See SH-2 Ref. Manual 6.5.11)
◆ gravity_X
|
private |
◆ gravity_Y
|
private |
◆ gravity_Z
|
private |
◆ GYRO_Q1
|
staticconstexpr |
Gyro Q point (See SH-2 Ref. Manual 6.5.13)
◆ HARD_RESET_DELAY_MS
|
staticconstexprprivate |
How long RST pin is held low during hard reset (min 10ns according to datasheet, but should be longer for stable operation)
◆ HOST_INT_TIMEOUT_DEFAULT_MS
|
staticconstexprprivate |
Max wait between HINT being asserted by BNO08x before transaction is considered failed (in miliseconds), when no reports are enabled (ie during reset)
◆ host_int_timeout_ms
|
private |
Max wait between HINT being asserted by BNO08x before transaction is considered failed (in miliseconds), determined by enabled report with longest period.
◆ imu_config
|
private |
IMU configuration settings.
◆ imu_spi_config
|
private |
SPI slave device settings.
◆ init_status
|
private |
Initialization status of various functionality, used by deconstructor during cleanup, set during initialization.
◆ integrated_gyro_velocity_X
|
private |
◆ integrated_gyro_velocity_Y
|
private |
◆ integrated_gyro_velocity_Z
|
private |
Raw gyro angular velocity reading from integrated gyro rotation vector (See SH-2 Ref. Manual 6.5.44)
◆ largest_sample_period_us
|
private |
Current largest sample period of any enabled report in microseconds (used to determine timeout for hint ISR).
◆ LINEAR_ACCELEROMETER_Q1
|
staticconstexpr |
Linear acceleration Q point (See SH-2 Ref. Manual 6.5.10)
◆ magf_accuracy
|
private |
Calibrated magnetic field reading in uTesla (See SH-2 Ref. Manual 6.5.16)
◆ MAGNETOMETER_Q1
|
staticconstexpr |
Magnetometer Q point (See SH-2 Ref. Manual 6.5.16)
◆ MAX_METADATA_LENGTH
|
staticconstexprprivate |
max length of metadata used in frs read operations
◆ mems_raw_accel_X
|
private |
◆ mems_raw_accel_Y
|
private |
◆ mems_raw_accel_Z
|
private |
Raw accelerometer readings from MEMS sensor (See SH2 Ref. Manual 6.5.8)
◆ mems_raw_gyro_X
|
private |
◆ mems_raw_gyro_Y
|
private |
◆ mems_raw_gyro_Z
|
private |
Raw gyro readings from MEMS sensor (See SH-2 Ref. Manual 6.5.12)
◆ mems_raw_magf_X
|
private |
◆ mems_raw_magf_Y
|
private |
◆ mems_raw_magf_Z
|
private |
Raw magnetometer (compass) readings from MEMS sensor (See SH-2 Ref. Manual 6.5.15)
◆ meta_data
|
private |
First 9 bytes of meta data returned from FRS read operation (we don't really need the rest) (See Ref. Manual 5.1)
◆ quat_accuracy
|
private |
Raw quaternion reading (See SH-2 Ref. Manual 6.5.44)
◆ queue_frs_read_data
|
private |
Queue used to send packet body from data_proc_task to frs read functions.
◆ queue_reset_reason
|
private |
Queue used to send reset reason from product id report to reset_reason() function.
◆ queue_rx_data
|
private |
Packet queue used to send data received from bno08x from spi_task to data_proc_task.
◆ queue_tx_data
|
private |
Packet queue used to send data to be sent over SPI from sending functions to spi_task.
◆ raw_accel_X
|
private |
◆ raw_accel_Y
|
private |
◆ raw_accel_Z
|
private |
◆ raw_bias_X
|
private |
◆ raw_bias_Y
|
private |
◆ raw_bias_Z
|
private |
Uncalibrated gyro reading (See SH-2 Ref. Manual 6.5.14)
◆ raw_calib_gyro_X
|
private |
◆ raw_calib_gyro_Y
|
private |
◆ raw_calib_gyro_Z
|
private |
Raw gyro reading (See SH-2 Ref. Manual 6.5.13)
◆ raw_lin_accel_X
|
private |
◆ raw_lin_accel_Y
|
private |
◆ raw_lin_accel_Z
|
private |
◆ raw_magf_X
|
private |
◆ raw_magf_Y
|
private |
◆ raw_magf_Z
|
private |
◆ raw_quat_I
|
private |
◆ raw_quat_J
|
private |
◆ raw_quat_K
|
private |
◆ raw_quat_radian_accuracy
|
private |
◆ raw_quat_real
|
private |
◆ raw_uncalib_gyro_X
|
private |
◆ raw_uncalib_gyro_Y
|
private |
◆ raw_uncalib_gyro_Z
|
private |
◆ REPORT_CNT
|
staticconstexprprivate |
Total unique reports that can be returned by BNO08x.
◆ report_period_trackers
|
private |
Current sample period of each report in microseconds linked to report ID (0 if not enabled).
◆ ROTATION_VECTOR_ACCURACY_Q1
|
staticconstexpr |
Rotation vector accuracy estimate Q point (See SH-2 Ref. Manual 6.5.18)
◆ ROTATION_VECTOR_Q1
|
staticconstexpr |
Rotation vector Q point (See SH-2 Ref. Manual 6.5.18)
◆ RX_DATA_LENGTH
|
staticconstexprprivate |
length buffer containing data received over spi
◆ SCLK_MAX_SPEED
|
staticconstexprprivate |
Max SPI SCLK speed BNO08x is capable of.
◆ sem_kill_tasks
|
private |
semaphore to count amount of killed tasks
◆ SENSOR_REPORT_ID_ACCELEROMETER
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.9.
◆ SENSOR_REPORT_ID_ARVR_STABILIZED_GAME_ROTATION_VECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.43.
◆ SENSOR_REPORT_ID_ARVR_STABILIZED_ROTATION_VECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.42.
◆ SENSOR_REPORT_ID_GAME_ROTATION_VECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.19.
◆ SENSOR_REPORT_ID_GEOMAGNETIC_ROTATION_VECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.20.
◆ SENSOR_REPORT_ID_GRAVITY
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.11.
◆ SENSOR_REPORT_ID_GYRO_INTEGRATED_ROTATION_VECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.44.
◆ SENSOR_REPORT_ID_GYROSCOPE
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.13.
◆ SENSOR_REPORT_ID_LINEAR_ACCELERATION
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.10.
◆ SENSOR_REPORT_ID_MAGNETIC_FIELD
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.16.
◆ SENSOR_REPORT_ID_PERSONAL_ACTIVITY_CLASSIFIER
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.36.
◆ SENSOR_REPORT_ID_RAW_ACCELEROMETER
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.8.
◆ SENSOR_REPORT_ID_RAW_GYROSCOPE
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.12.
◆ SENSOR_REPORT_ID_RAW_MAGNETOMETER
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.15.
◆ SENSOR_REPORT_ID_ROTATION_VECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.18.
◆ SENSOR_REPORT_ID_STABILITY_CLASSIFIER
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.31.
◆ SENSOR_REPORT_ID_STEP_COUNTER
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.29.
◆ SENSOR_REPORT_ID_TAP_DETECTOR
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.27.
◆ SENSOR_REPORT_ID_UNCALIBRATED_GYRO
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.14.
◆ SHTP_REPORT_BASE_TIMESTAMP
|
staticconstexprprivate |
See SH2 Ref. Manual 7.2.1.
◆ SHTP_REPORT_COMMAND_REQUEST
|
staticconstexprprivate |
See SH2 Ref. Manual 6.3.8.
◆ SHTP_REPORT_COMMAND_RESPONSE
|
staticconstexprprivate |
See SH2 Ref. Manual 6.3.9.
◆ SHTP_REPORT_FRS_READ_REQUEST
|
staticconstexprprivate |
See SH2 Ref. Manual 6.3.6.
◆ SHTP_REPORT_FRS_READ_RESPONSE
|
staticconstexprprivate |
See SH2 Ref. Manual 6.3.7.
◆ SHTP_REPORT_GET_FEATURE_RESPONSE
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.5.
◆ SHTP_REPORT_PRODUCT_ID_REQUEST
|
staticconstexprprivate |
See SH2 Ref. Manual 6.3.1.
◆ SHTP_REPORT_PRODUCT_ID_RESPONSE
|
staticconstexprprivate |
See SH2 Ref. Manual 6.3.2.
◆ SHTP_REPORT_SET_FEATURE_COMMAND
|
staticconstexprprivate |
See SH2 Ref. Manual 6.5.4.
◆ spi_hdl
|
private |
SPI device handle.
◆ spi_task_hdl
|
private |
spi_task() handle
◆ spi_transaction
|
private |
SPI transaction handle.
◆ stability_classifier
|
private |
BNO08xStability status reading (See SH-2 Ref. Manual 6.5.31)
◆ step_count
|
private |
Step counter reading (See SH-2 Ref. Manual 6.5.29)
◆ TAG
|
staticconstexprprivate |
Class tag used for serial print statements.
◆ tap_detector
|
private |
Tap detector reading (See SH-2 Ref. Manual 6.5.27)
◆ TARE_ARVR_STABILIZED_GAME_ROTATION_VECTOR
|
staticconstexpr |
Tare ARVR stabilized game rotation vector.
◆ TARE_ARVR_STABILIZED_ROTATION_VECTOR
|
staticconstexpr |
Tare ARVR stabilized rotation vector.
◆ TARE_AXIS_ALL
|
staticconstexpr |
Tare all axes (used with tare now command)
◆ TARE_AXIS_Z
|
staticconstexpr |
Tar yaw axis only (used with tare now command)
◆ TARE_GAME_ROTATION_VECTOR
|
staticconstexpr |
Tare game rotation vector.
◆ TARE_GEOMAGNETIC_ROTATION_VECTOR
|
staticconstexpr |
tare geomagnetic rotation vector
◆ TARE_GYRO_INTEGRATED_ROTATION_VECTOR
|
staticconstexpr |
Tare gyro integrated rotation vector.
◆ TARE_NOW
|
staticconstexprprivate |
See SH2 Ref. Manual 6.4.4.1.
◆ TARE_PERSIST
|
staticconstexprprivate |
See SH2 Ref. Manual 6.4.4.2.
◆ TARE_ROTATION_VECTOR
|
staticconstexpr |
Tare rotation vector.
◆ TARE_SET_REORIENTATION
|
staticconstexprprivate |
See SH2 Ref. Manual 6.4.4.3.
◆ TASK_CNT
|
staticconstexprprivate |
Total amount of tasks utilized by BNO08x driver library.
◆ time_stamp
|
private |
Report timestamp (see datasheet 1.3.5.3)
The documentation for this class was generated from the following files: